تُستخدم المحركات الكهربائية المعروفة باسم المحركات المتدرجة بشكل متكرر في التطبيقات التي تتطلب التحكم الدقيق في موضع الدوران والسرعة والاتجاه. وهي تختلف عن محركات التيار المستمر العادية في أنها تتحرك في خطوات منفصلة، مما يوفر تحكمًا أدق في حركة المحرك.
ما هو المحرك المتدرج؟
كل خطوة هي دوران زاوي لعمود المحرك، ويمكن التحكم في المحرك ليدور بعدد محدد من الخطوات. تم تصميم هذه المحركات لتدور بمقدار ثابت، عادة في نطاق 0.9 درجة إلى 1.8 درجة لكل خطوة، اعتمادًا على تصميم المحرك. تتمثل الميزة الرئيسية للمحركات ذات السائر في قدرتها على تحقيق التحكم الدقيق دون الحاجة إلى أنظمة التغذية الراجعة مقارنة بأنواع المحركات الأخرى (مثل محركات التيار المستمر ذات الفرشاة). يتم التحكم في المحركات ذات السائر عادةً عن طريق إرسال سلسلة من النبضات الكهربائية إلى لفائف المحرك، حيث تتسبب كل نبضة في تحريك المحرك خطوة واحدة للأمام أو للخلف.
أنواع المحركات المتدرجة
قبل الخوض في تقنيات التحكم، من المهم فهم الأنواع المختلفة للمحركات ذات السائر، لأنها تؤثر على طريقة التحكم في المحرك:
محركات السائر ذات المغناطيس الدائم (PM):
- مع وجود مغناطيس دائم في الدوار، توفر هذه المحركات عزم دوران وكفاءة متزايدين عند سرعات منخفضة.
- إنها النوع الأكثر شيوعًا من محركات السائر وهي مثالية للتطبيقات ذات السرعة المنخفضة.
محركات السائر ذات الممانعة المتغيرة (VR):
- في هذه المحركات، يكون الدوار مصنوعًا من الحديد اللين، ويتم توجيه حركة الدوار عن طريق تغيرات الممانعة المغناطيسية عند تنشيط الجزء الثابت.
- مقارنة بمحركات PM، فإنها تتمتع بعزم دوران أقل ولكن بقدرة سرعة أفضل.
محركات السائر الهجينة:
- تجمع هذه المحركات بين خصائص محركات السائر ذات الممانعة المتغيرة والممانعة. يتم تحقيق التوازن بين عزم الدوران العالي والدقة والسرعة.
- تعتبر محركات السائر الهجينة الأكثر استخدامًا في التطبيقات الصناعية.
المبادئ الأساسية للتحكم في محرك السائر
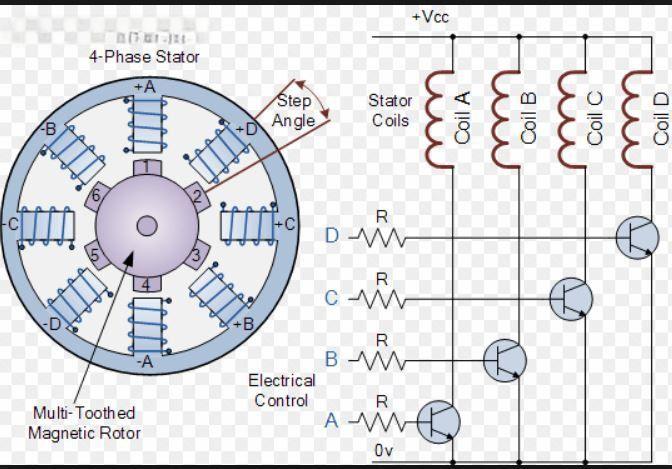
تعتمد محركات السائر على مجموعة من اللفات مرتبة في الجزء الثابت لتوليد المجالات المغناطيسية. يتم إنشاء الحركة من خلال تفاعل هذه المجالات مع الدوار أو المكون الدوار. عادةً، باستخدام مغناطيس دائم أو قطعة من الحديد اللين، يتحرك الدوار تدريجيًا مع تنشيط لفات الجزء الثابت بترتيب معين.
هناك العديد من المفاهيم الأساسية لفهم التحكم في محرك السائر:
زاوية الخطوة:
تحدد زاوية الخطوة مقدار حركة الدوار مع كل خطوة. على سبيل المثال، إذا كان للمحرك المتدرج زاوية خطوة 1.8 درجة، فسوف يتحرك دوار المحرك بمقدار 1.8 درجة لكل نبضة.
يمكن تحديد الدوران الكلي للمحرك عن طريق قسمة 360 درجة على زاوية الخطوة. على سبيل المثال، يتطلب المحرك بزاوية خطوة 1.8 درجة 200 خطوة لإكمال دورة كاملة (360 درجة / 1.8 درجة = 200 خطوة).
أوضاع الخطوة:
يمكن تشغيل محركات السائر في أوضاع مختلفة اعتمادًا على كيفية تنشيط الملفات:
- الخطوة الكاملة: يتم تنشيط المحرك بحيث تحرك كل خطوة الدوار بزاوية الخطوة الكاملة.
- نصف الخطوة: يتحرك المحرك بخطوات أصغر، مما يوفر حركة أكثر سلاسة ودقة أعلى.
- الميكروستيب: هذا هو الوضع الأكثر تقدمًا، حيث يتم تنشيط ملفات المحرك بطريقة تجعل الدوار يتحرك بزيادات صغيرة جدًا. وهذا يوفر تحكمًا دقيقًا للغاية وحركة سلسة.
الطور والملف:
- يتكون المحرك الخطوي من مراحل أو ملفات متعددة. من خلال تنشيط هذه الملفات بالترتيب الصحيح، يتم إجبار الدوار على التحرك بشكل تدريجي.
- على سبيل المثال، في المحرك الخطوي ثنائي الطور، يدور الدوار بخطوات مميزة بسبب المجال المغناطيسي الناتج عن تنشيط الملفات بترتيب معين.
طرق التحكم في المحرك الخطوي
هناك عدة طرق للتحكم في المحرك الخطوي، ولكل منها مزاياها وعيوبها. تعتمد الطريقة التي تختارها على التطبيق والدقة المطلوبة والأجهزة المتوفرة.
استخدام متحكم دقيق (مثل Arduino)
غالبًا ما يتم التحكم في المحركات الخطوية بواسطة متحكمات دقيقة. فهي تنتج إشارات النبض المطلوبة التي يتم نقلها إلى دائرة تشغيل المحرك، والتي تنظم التيار المار عبر ملفات المحرك. تُستخدم هذه التقنية بشكل متكرر في الآلات الصغيرة والمشاريع التي يمكن تنفيذها بنفسك.
على سبيل المثال، يمكن للوحة Arduino التحكم في محرك متدرج باستخدام مكتبة مثل AccelStepper. ترسل لوحة Arduino سلسلة من النبضات الرقمية إلى مشغل المحرك، ويقوم المشغل بتزويد ملفات المحرك بالجهد والتيار المناسبين.
مثال على كود Arduino الأساسي:
#include
<Stepper.h>
const int stepsPerRevolution = 200; // Change this to match your motor’s specification // Initialize the Stepper library with the number of steps per revolution
Stepper stepper(stepsPerRevolution, 8, 9, 10, 11); void setup() {
// Set the motor speed (in RPM)
stepper.setSpeed(60);
} void loop() {
// Move the motor 100 steps forward
stepper.step(100);
delay(1000); // Move the motor 100 steps backward
stepper.step(-100);
delay(1000);
}
استخدام مشغل محرك متدرج مخصص
يمكنك التحكم في التيار المتدفق إلى ملفات محرك المتدرج باستخدام دائرة متخصصة تُعرف باسم برنامج تشغيل محرك المتدرج، مثل A4988 أو DRV8825. بالإضافة إلى التعامل مع التيارات الأعلى التي تحتاجها محركات المتدرج، توفر برامج التشغيل هذه إمكانيات خطوة دقيقة لحركة أكثر سلاسة. على سبيل المثال، يمكن دمج لوحة Arduino أو غيرها من وحدات التحكم الدقيقة مع برنامج تشغيل مثل A4988 للتحكم في محرك المتدرج من خلال إشارات النبض. يولد برنامج التحكم الدقيق إشارة، ويتحكم برنامج التشغيل في ملفات المحرك وفقًا لتلك الإشارة.
التوصيلات الأساسية لمحرك A4988 باستخدام Arduino:
- VDD إلى Arduino 5V
- GND إلى Arduino GND
- STEP إلى دبوس رقمي Arduino (على سبيل المثال، الدبوس 3)
- DIR إلى دبوس رقمي Arduino (على سبيل المثال، الدبوس 4)
- VMOT إلى مصدر طاقة المحرك
- دبابيس M0 وM1 وM2 لإعدادات microstepping (اختياري)
استخدام الكمبيوتر أو PLC (وحدة تحكم منطقية قابلة للبرمجة)
بالنسبة للتطبيقات الصناعية والأكثر تعقيدًا، يمكن التحكم في المحركات المتدرجة بواسطة كمبيوتر يعمل ببرنامج تحكم أو بواسطة PLC. هذا الإعداد شائع في آلات CNC والأنظمة الآلية، حيث يلزم التحكم بمستوى أعلى للمحركات المتعددة والحركة الدقيقة.
التحكم باستخدام مصدر طاقة
بالإضافة إلى المحركات، يعد مصدر الطاقة مكونًا رئيسيًا في التحكم في المحرك ذي السائر. يجب أن تتطابق مواصفات الجهد والتيار للمحرك والمحرك، حيث يمكن أن يؤدي مصدر الطاقة غير المناسب إلى ارتفاع درجة الحرارة وفقدان عزم الدوران وتلف المحرك.
إشارات التحكم والتوقيت
- معدل النبض (التردد): يحدد تردد إشارة النبض سرعة المحرك. ترتبط الحركة الأسرع بتردد أعلى، بينما ترتبط الحركة الأبطأ بتردد أقل.
- التحكم في الاتجاه: بالنسبة للعديد من المحركات، يتحكم دبوس DIR في اتجاه الدوران. سيؤدي تغيير حالة هذا الدبوس (مرتفع أو منخفض) إلى عكس دوران المحرك.
مخطط ملخص التحكم في المحرك ذي السائر
| طريقة التحكم | المزايا | العيوب |
| المتحكم الدقيق | منخفض التكلفة، بسيط، سهل البرمجة | قدرة محدودة على التعامل مع الطاقة |
| محرك الخطوة المخصص | موثوق، يتعامل مع طاقة أعلى، يدعم الخطوات الدقيقة | أسلاك أكثر تعقيدًا، تكلفة إضافية |
| التحكم القائم على PLC/الحاسوب | دقة عالية، قابل للتوسع في الأنظمة الكبيرة | مكلف، إعداد معقد |
| التحكم بمصدر الطاقة | أساسي، يعمل للتطبيقات البسيطة | وظائف محدودة، لا يدعم التحكم المتقدم |
الاعتبارات الرئيسية عند التحكم في المحرك ذي السائر
- متطلبات الطاقة: تتطلب المحركات الخطوية طاقة أكبر من المحركات ذات التيار المستمر العادية، وخاصة عندما تكون تحت الحمل أو تعمل بسرعات عالية. لمنع التلف، استخدم دائمًا مصدر طاقة متوافق مع متطلبات المحرك.
- تبديد الحرارة: تميل المحركات الخطوية إلى السخونة، وخاصة تحت الأحمال الثقيلة. إذا كان المحرك يعمل لفترات طويلة، فتأكد من وجود تهوية مناسبة أو فكر في إضافة مشعات حرارية أو مراوح.
- التدحرج الدقيق: بينما يمنح التدحرج الكامل المحرك أعلى عزم دوران له، يوفر التدحرج الدقيق حركة أكثر سلاسة ودقة أفضل، وإن كان ذلك بعزم دوران أقل. عند اختيار نهج التحكم الخاص بك، من الضروري فهم المقايضات.
الخلاصة
إن فهم سلوك المحرك الخطوي واختيار أفضل استراتيجية تحكم لتطبيقك أمر ضروري للتحكم فيه. سواء كنت تستخدم متحكمًا دقيقًا مثل Arduino أو محركًا مخصصًا مثل A4988 أو أنظمة صناعية أكثر تقدمًا، توفر محركات السائر تحكمًا ممتازًا في الموضع والسرعة دون الحاجة إلى أنظمة ردود الفعل. من خلال اختيار التركيبة الصحيحة من الطاقة والمحركات وإشارات التحكم، يمكنك تحقيق تشغيل دقيق وموثوق به لمشروعك.