Schrittmotoren sind ein wichtiger Bestandteil präziser Bewegungssteuerungssysteme. Ihr Wert liegt in ihrer Fähigkeit, diskrete, kontrollierte Bewegungen in Schritten auszuführen. Die Betriebsleistung eines Schrittmotors hängt eng mit seiner Phasenkonfiguration zusammen, einem grundlegenden Konzept, das die Anzahl der Schritte pro Umdrehung, die Drehmomenterzeugung und die Laufruhe bestimmt.
Was bedeutet die Phase eines Schrittmotors?
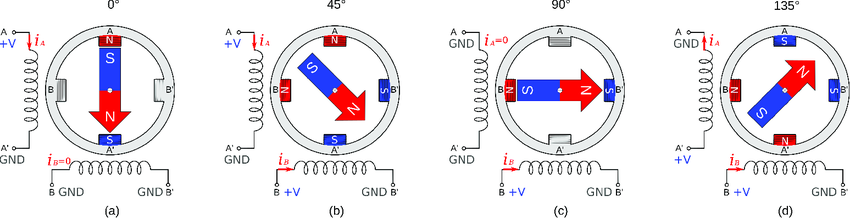
Eine Phase in einem Schrittmotor bezieht sich auf eine einzelne Wicklung oder Spule im Stator. Der Stator ist der stationäre Teil des Motors, in dem elektrische Energie in mechanische Bewegung umgewandelt wird. Jede Phase wird nacheinander aktiviert, um ein rotierendes Magnetfeld zu erzeugen, das den Rotor – einen gezahnten Permanentmagneten oder einen Eisenkern – mit sich zieht. Wenn sich das Magnetfeld schrittweise bewegt, bewegt sich auch der Rotor, was zu der charakteristischen Schrittbewegung des Motors führt. Die Anzahl der Phasen in einem Schrittmotor wirkt sich direkt auf das Verhalten des Motors aus. Zu den gängigen Konfigurationen gehören beispielsweise zweiphasige, dreiphasige und fünfphasige Schrittmotoren, jede mit ihren eigenen Leistungsmerkmalen.
Der Stator ist der stationäre Teil des Motors, in dem elektrische Energie in mechanische Bewegung umgewandelt wird. Jede Phase wird nacheinander aktiviert, um ein rotierendes Magnetfeld zu erzeugen, das den Rotor – einen gezahnten Permanentmagneten oder einen Eisenkern – mit sich zieht. Wenn sich das Magnetfeld schrittweise bewegt, bewegt sich auch der Rotor, was zu der charakteristischen Schrittbewegung des Motors führt.
Die Anzahl der Phasen in einem Schrittmotor wirkt sich direkt auf das Verhalten des Motors aus. Gängige Konfigurationen sind beispielsweise zweiphasige, dreiphasige und fünfphasige Schrittmotoren, jede mit ihren eigenen Leistungsmerkmalen.
Zweiphasen-Schrittmotoren
Zweiphasige Schrittmotoren sind der häufigste Typ, insbesondere bei Anwendungen mit geringer bis mittlerer Leistung. Sie sind in zwei Hauptwicklungskonfigurationen erhältlich: unipolar und bipolar.
Unipolare Schrittmotoren
Bei unipolaren Schrittmotoren ist jede Phasenwicklung in zwei Hälften mit einem Mittelabgriff geteilt. Dank ihrer Konstruktion kann jeweils nur eine Spule effizient geladen werden, da der Strom immer nur durch die Hälfte der Wicklung fließt. Der Vorteil unipolarer Motoren besteht darin, dass sie die Steuerschaltung vereinfachen, da die Stromrichtung nicht umgekehrt werden muss. Eigenschaften unipolarer Motoren:
- Einfache Steuerung: Unipolare Schrittmotoren sind einfacher zu steuern, da der Strom nicht die Richtung ändern muss.
- Geringeres Drehmoment: Da immer nur die Hälfte der Wicklung mit Strom versorgt wird, erzeugen unipolare Motoren im Vergleich zu bipolaren Motoren tendenziell weniger Drehmoment.
- Häufige Anwendungen: Sie werden oft in Anwendungen mit geringem Stromverbrauch wie Druckern und CNC-Maschinen verwendet, bei denen Einfachheit und Kosteneffizienz im Vordergrund stehen.
Bipolare Schrittmotoren
Bipolare Schrittmotoren hingegen nutzen die gesamte Wicklung für jede Phase, benötigen jedoch eine Stromrichtungsumkehr. Das bedeutet, dass bipolare Motoren ein komplexeres Steuersystem mit H-Brückenschaltungen benötigen, um die Stromrichtung zu steuern. Da jedoch beide Hälften der Wicklung genutzt werden, erzeugen bipolare Schrittmotoren mehr Drehmoment als ihre unipolaren Gegenstücke. Eigenschaften bipolarer Motoren:
- Höheres Drehmoment: Die gesamte Wicklung wird genutzt, sodass der Motor mehr Drehmoment erzeugt als ein unipolarer Motor gleicher Größe.
- Komplexere Steuerung: Erfordert H-Brückenschaltungen zur Umkehrung der Stromrichtung.
- Häufige Anwendungen: Bipolare Schrittmotoren werden in leistungsstärkeren Anwendungen wie der industriellen Automatisierung, Robotik und High-End-3D-Druckern eingesetzt.
Dreiphasige Schrittmotoren
Dreiphasen-Schrittmotoren sind weniger verbreitet als Zweiphasenmotoren, bieten aber mehrere Vorteile, insbesondere in Bezug auf Laufruhe und Drehmomenterzeugung. Die erhöhte Phasenzahl ermöglicht eine kontinuierlichere Rotation des Magnetfelds, was zu gleichmäßigeren Bewegungen und weniger Vibrationen führt. Eigenschaften von Dreiphasen-Schrittmotoren:
- Reibungsloser Betrieb: Je mehr Phasen, desto sanfter der Übergang zwischen den Schritten, was zu weniger Vibrationen führt.
- Höhere Effizienz: Dreiphasige Schrittmotoren sind effizienter und können bei einer bestimmten Leistungsaufnahme mehr Drehmoment erzeugen als zweiphasige Motoren.
- Komplexe Steuerungsanforderungen: Obwohl die Motorleistung mit mehr Phasen zunimmt, wird die Steuerungsschaltung komplexer und erfordert anspruchsvollere Treiber.
- Häufige Anwendungen: Diese Motoren werden häufig in hochpräzisen Anwendungen wie medizinischen Geräten eingesetzt, bei denen eine gleichmäßige Bewegung und ein hohes Drehmoment entscheidend sind.
Fünfphasen Schrittmotoren
Fünfphasen-Schrittmotoren bieten eine noch feinere Steuerung und gelten als die sanfteste und effizienteste Schrittmotorkonfiguration. Mit mehr Phasen kann sich der Rotor in kleineren Schritten bewegen, was die Auflösung erhöht und Vibrationen weiter reduziert. Eigenschaften von Fünfphasen-Schrittmotoren:
- Sehr gleichmäßige Bewegung: Die große Anzahl an Phasen ermöglicht extrem kleine Schrittwinkel, was zu einem sehr gleichmäßigen Betrieb führt.
- Höhere Auflösung: Fünfphasenmotoren können hochauflösende Schritte erreichen, was bei Anwendungen von Vorteil ist, die eine präzise Positionierung erfordern.
- Teurer und komplexer: Aufgrund der zusätzlichen Phasen sind diese Motoren teurer und erfordern komplexe Steuerungssysteme.
- Häufige Anwendungen: Wenn ein Höchstmaß an Genauigkeit erforderlich ist, werden sie in Spezialmaschinen wie Maschinen zur Halbleiterproduktion eingesetzt.
Auswirkungen der Phasenkonfiguration auf die Leistung
Die Anzahl der Phasen in einem Schrittmotor beeinflusst mehrere wichtige Leistungsmerkmale, darunter:
Schrittwinkel
Die Winkeldistanz, die der Rotor in einem einzelnen Schritt zurücklegt, wird als Schrittwinkel bezeichnet. Motoren mit mehr Phasen haben im Allgemeinen kleinere Schrittwinkel, was eine feinere Steuerung der Motorposition ermöglicht. Ein Zweiphasen-Schrittmotor kann beispielsweise einen Schrittwinkel von 1,8 Grad haben, was bedeutet, dass für eine volle Umdrehung 200 Schritte erforderlich sind. Im Gegensatz dazu könnte ein Fünfphasenmotor einen Schrittwinkel von nur 0,72 Grad haben, was 500 Schritte pro Umdrehung ermöglicht.
Drehmoment
Die Drehmomenterzeugung ist ein weiterer kritischer Faktor, der von der Phasenkonfiguration beeinflusst wird. Bipolare Motoren, die beide Hälften jeder Wicklung verwenden, erzeugen ein höheres Drehmoment als unipolare Motoren gleicher Größe. Ebenso können dreiphasige und fünfphasige Motoren aufgrund der kontinuierlicheren Natur ihres Magnetfelds ein höheres Drehmoment erzeugen.
Reibungsloser Betrieb
Mehr Phasen führen zu sanfteren Übergängen zwischen den Schritten, verringern Vibrationen und verbessern die Leistung bei Anwendungen, die Präzision erfordern. Fünfphasenmotoren sind in der Regel die sanftesten, gefolgt von Dreiphasen- und dann Zweiphasenmotoren.
Kontrollkomplexität
Die Komplexität des Steuerungssystems steigt mit der Anzahl der Stufen. Beispielsweise ist ein zweiphasiger Unipolarmotor am einfachsten zu steuern, während ein fünfphasiger Motor komplexere Schaltkreise erfordert, um die Erregung der Wicklungen zu steuern.
Abschluss
Um mehr über die Phasenkonfiguration und ihre Auswirkungen auf das Motorverhalten zu erfahren, wenden Sie sich an einen professionellen Schrittmotorhersteller, um die optimale Leistung präziser Steuerungssysteme sicherzustellen.