Servomotoren sind wichtige Bestandteile vieler Anwendungen, darunter Automatisierung, Robotik, CNC-Maschinen und Fertigung. Um optimale Leistung, Kosteneffizienz und Energieeffizienz zu gewährleisten, ist die Auswahl der geeigneten Servomotorgröße unerlässlich. Dieser Leitfaden bietet einen detaillierten Einblick in Servomotorgrößen, ihre Spezifikationen und wie Sie den richtigen für Ihre Anwendung auswählen.
Was ist ein Servomotor?
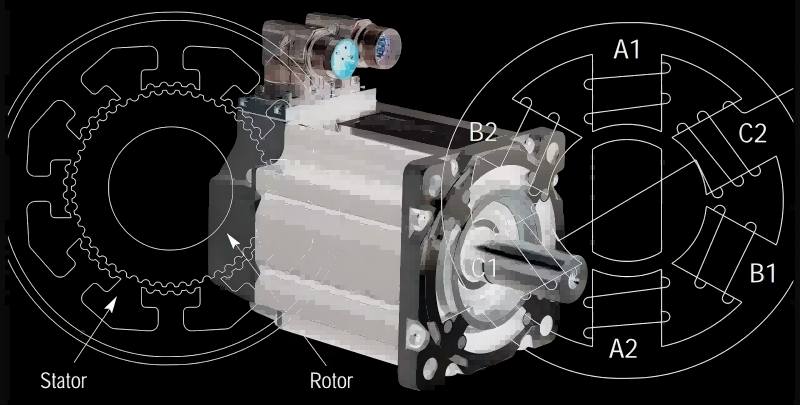
Ein Servomotor ist eine Art linearer oder rotierender Aktuator, der eine genaue Steuerung von Beschleunigung, Geschwindigkeit und Winkelposition ermöglicht. Ein Motor und ein Rückkopplungssensor sind für eine geschlossene Regelschleife gekoppelt. Branchen, die eine präzise Positionierung und Geschwindigkeitsregelung benötigen, nutzen Servomotoren in großem Umfang.
Hauptmerkmale:
- Hohe Präzision
- Schnelle Reaktionszeit
- Kompaktes Design
- Anpassbares Drehmoment und Geschwindigkeit
Warum sind Servomotorgrößen wichtig?
Die Größe eines Servomotors wirkt sich auf sein Drehmoment, seine Geschwindigkeit und seine Leistungsfähigkeit unter Last aus. Die Wahl eines Motors mit falscher Größe kann zu Folgendem führen:
- Unterdimensionierung: Unzureichendes Drehmoment, Überhitzung und verkürzte Lebensdauer.
- Überdimensionierung: Unnötige Kosten, größerer Platzbedarf und Ineffizienz.
Um optimale Leistung zu gewährleisten, ist es wichtig, die Größenklassifizierungen und Spezifikationen von Motoren zu verstehen.
Klassifizierung von Servomotoren nach Größe
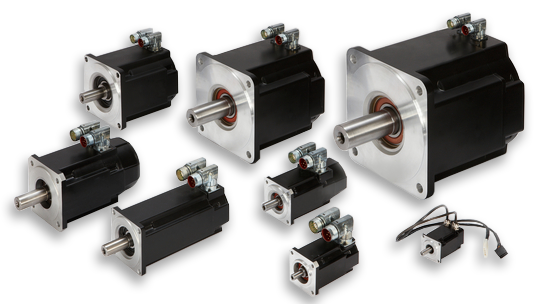
Servomotoren gibt es in verschiedenen Größen, von Miniaturmotoren für kleine elektronische Geräte bis hin zu großen Motoren, die in Industriemaschinen verwendet werden. Die Dimensionierung eines Servomotors hängt von mehreren Faktoren ab, darunter:
- Drehmomentanforderungen: Das Drehmoment, das zum Bewegen oder Halten einer Last erforderlich ist.
- Geschwindigkeitsanforderungen: Die Geschwindigkeit, mit der der Motor arbeiten muss.
- Lastträgheit: Der Widerstand der Last gegenüber Bewegungsänderungen.
- Anwendungstyp: Ob der Motor zum Positionieren, für kontinuierliche Bewegung oder für beides verwendet wird.
Schlüsselfaktoren bei der Dimensionierung von Servomotoren
Das Verständnis Ihrer Anwendung und der Fähigkeiten des Motors ist für die richtige Dimensionierung von Servomotoren von entscheidender Bedeutung. Die wichtigsten Überlegungen sind wie folgt:
Drehmoment
Servomotoren werden nach ihrem Drehmoment bewertet, das normalerweise in Newtonmetern (Nm) oder Unzen-Zoll (oz-in) ausgedrückt wird. Das für Ihre Anwendung erforderliche Drehmoment bestimmt die Größe des Motors.
- Dauerdrehmoment: Das Drehmoment, das ein Motor kontinuierlich liefern kann, ohne zu überhitzen.
- Spitzendrehmoment: Das höchste Drehmoment, das ein Motor während kurzer Zeiträume erzeugen kann.
Geschwindigkeit
Die Motordrehzahl wird normalerweise in Umdrehungen pro Minute (U/min) gemessen. Anwendungen, die Hochgeschwindigkeitsbewegungen erfordern, benötigen möglicherweise kleinere, leichtere Motoren mit höheren U/min-Kapazitäten.
Leistung
Das Produkt aus Drehmoment und Winkelgeschwindigkeit wird zur Berechnung der Leistung verwendet. Für Anwendungen, die mehr Leistung benötigen, können größere Servomotoren erforderlich sein.
Physikalische Abmessungen
Servomotoren sind in verschiedenen physikalischen Größen erhältlich, die häufig durch die Rahmengröße bestimmt werden. Gängige Rahmengrößen basieren auf Industriestandards wie den Größen der NEMA (National Electrical Manufacturers Association).
Gängige Servomotorgrößen
Hier ist eine Aufschlüsselung der gängigen Servomotorgrößen und ihrer typischen Anwendungen:
| Servomotorgröße | Drehmomentbereich | Geschwindigkeitsbereich | Typische Anwendungen |
| Mikro | < 0,1 Nm | 1000–5000 U/min | Kleine Roboter, Drohnen, Hobbyprojekte |
| Klein | 0,1–1 Nm | 1000–6000 U/min | Medizinische Geräte, 3D-Drucker, CNC-Maschinen |
| Mittel | 1–10 Nm | 500–3000 U/min | Industrieroboter, Verpackungsmaschinen |
| Groß | > 10 Nm | 100–1500 U/min | Schwerindustrie, Fördersysteme |
Drehmoment vs. Geschwindigkeit: Den Kompromiss verstehen
Servomotoren arbeiten innerhalb eines Kompromisses zwischen Drehmoment und Geschwindigkeit. Je schneller ein Motor läuft, desto weniger Drehmoment kann er liefern. Umgekehrt haben Motoren mit hohem Drehmoment oft niedrigere Maximaldrehzahlen. Diese Beziehung wird normalerweise in einer Drehmoment-Drehzahl-Kurve dargestellt.
Beispiel einer Drehmoment-Drehzahl-Kurve
Nachfolgend finden Sie eine allgemeine Darstellung einer Drehmoment-Drehzahl-Kurve für einen Servomotor:
- Bereich 1: Dauerhaftes Drehmoment bei niedrigeren Drehzahlen.
- Bereich 2: Spitzendrehmoment für kurze Zeiträume.
- Bereich 3: Reduziertes Drehmoment bei hohen Drehzahlen.
| Drehzahl (U/min) | Drehmoment (Nm) |
| 500 | 10 |
| 1000 | 8 |
| 2000 | 6 |
| 3000 | 4 |
| 4000 | 2 |
Dimensionierungsbeispiel: Auswahl eines Servomotors für eine CNC-Maschine
Stellen Sie sich vor, Sie entwickeln eine CNC-Maschine, die Folgendes erfordert:
- Lastträgheit: 0,02 kg·m²
- Drehzahl: 1500 U/min
- Dauerhaftes Drehmoment: 3 Nm
- Spitzendrehmoment: 6 Nm
Mit diesen Parametern würden Sie:
- Den Drehzahlbereich auswählen: Wählen Sie einen Motor mit mindestens 1500 U/min.
- Drehmomentanforderungen prüfen: Suchen Sie nach einem Motor mit 3 Nm Dauerdrehmoment und 6 Nm Spitzendrehmoment.
- Trägheit anpassen: Stellen Sie sicher, dass die Trägheit des Motors der Lastträgheit entspricht oder etwas höher ist, um Stabilität zu gewährleisten.
Für dieses Beispiel wäre wahrscheinlich ein mittelgroßer Servomotor geeignet.
Größentabelle für NEMA-Servomotoren
Um den Auswahlprozess zu vereinfachen, finden Sie hier eine allgemeine Tabelle mit typischen Servomotorgrößen und ihren Spezifikationen:
| Rahmengröße | Dauerhaftes Drehmoment (Nm) | Spitzendrehmoment (Nm) | Drehzahl (RPM) | Anwendungen |
| NEMA 17 | 0,2–0,5 | 0,5–1,0 | 3000–5000 | Kleine Roboter, 3D-Drucker |
| NEMA 23 | 0,5–2,0 | 2,0–4,0 | 1000–3000 | CNC-Maschinen, Verpackung |
| NEMA 34 | 2,0–8,0 | 8,0–16,0 | 500–1500 | Industrielle Automatisierung, Roboter |
| Sondergröße Groß | > 8,0 | > 16,0 | 100–500 | Förderbänder, Schwerlastheben |
Schritte zur Auswahl der richtigen Servomotorgröße
- Anwendungsanforderungen definieren: Bestimmen Sie Drehmoment, Drehzahl und Lastträgheit.
- Motorspezifikationen überprüfen: Vergleichen Sie die Spezifikationen verfügbarer Motoren mit Ihren Anforderungen.
- Physische Einschränkungen berücksichtigen: Um sicherzustellen, dass der Motor mit Ihrer Maschine funktioniert, überprüfen Sie seine physischen Abmessungen.
- Simulationen durchführen: Verwenden Sie Simulationstools oder -software, um die Leistung des Motors unter erwarteten Betriebsbedingungen zu überprüfen.
- Umweltfaktoren bewerten: Berücksichtigen Sie Wärmeableitung, Vibration und Montageanforderungen.
Vorteile der richtigen Servomotorgröße
- Effizienz: Vermeidet Energieverschwendung und Überhitzung.
- Kosteneffizienz: Reduziert Anschaffungs- und Betriebskosten.
- Zuverlässigkeit: Gewährleistet langfristigen Betrieb ohne Ausfälle.
- Leistung: Bietet präzise Steuerung und Genauigkeit.
Zukünftige Trends im Servomotordesign
Mit der Weiterentwicklung der Technologie werden Servomotoren kleiner, leistungsstärker und energieeffizienter. Zu den wichtigsten Trends gehören:
- Miniaturisierung: Mikroservomotoren mit höherem Drehmoment für kompakte Anwendungen.
- Integration: Integrierte Controller für Plug-and-Play-Funktionalität.
- Energieeffizienz: Verbesserte Designs reduzieren den Stromverbrauch.
Fazit
Die Wahl der richtigen Servomotorgröße ist ein entscheidender Schritt bei der Entwicklung eines effizienten und kostengünstigen Systems. Das Verständnis der Beziehung zwischen Größe, Drehmoment und Anwendungsanforderungen gewährleistet optimale Leistung. Indem Sie Faktoren wie Lastanforderungen, Umgebungsbedingungen und Systemkompatibilität berücksichtigen und einen vertrauenswürdigen Servomotorhersteller konsultieren, können Sie einen Servomotor auswählen, der Ihren spezifischen Anforderungen entspricht.