Hersteller von Hybrid Schrittmotor
Wir sind spezialisiert auf die Entwicklung und Herstellung von Hybrid-Schrittmotoren in verschiedenen Rahmengrößen (von 20 mm bis 110 mm), Schrittwinkeln und Optionen. Beginnen Sie Ihr Projekt mit unseren konfigurierbaren, serienmäßigen hybriden Synchron-Schrittmotoren oder arbeiten Sie mit unserem engagierten Engineering-Team an einer maßgeschneiderten Lösung, die Ihren spezifischen Anforderungen entspricht.
Hier sind einige der anpassbaren Optionen:
- Phasenkonfiguration: 2-phasig, 3-phasig, 4-phasig, 5-phasig
- Schrittwinkel: 0,72 Grad, 0,9 Grad, 1,2 Grad, 1,8 Grad
- Wicklungskonfiguration: Unipolar und bipolar
- Wellenoptionen: Länge, Durchmesser, Form (z. B. rund, D-Schnitt, Keilwellenform) und Material
Home / Hybrid Schrittmotor
Struktur
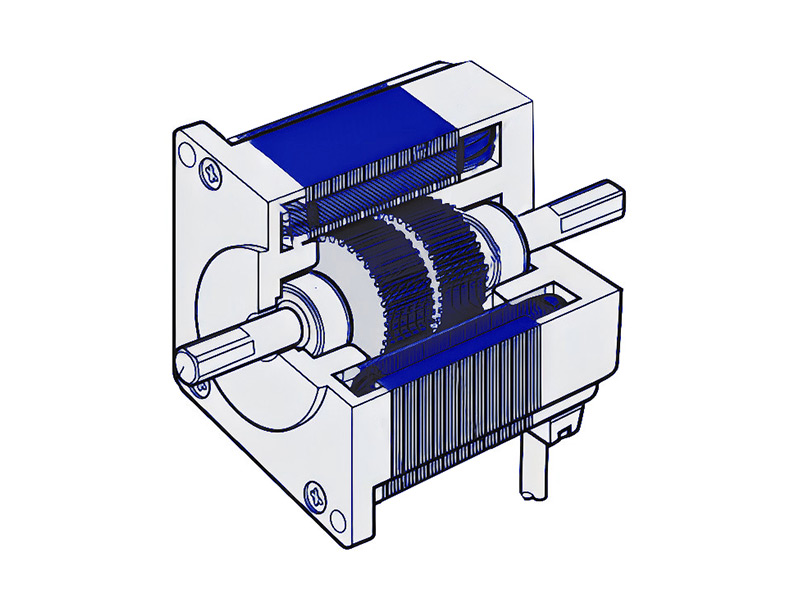
- Rotor: Der Rotor verfügt über Permanentmagnete, einen laminierten Kern zur Reduzierung von Wirbelstromverlusten und Zähne zur Feinpositionierung mit dem Stator.
- Stator: Die mehreren Wicklungen des Stators erzeugen das Magnetfeld und seine Zähne sind mit den Zähnen des Rotors ausgerichtet, um Drehmoment und Präzision zu verbessern.
- Welle: Verbindet den Rotor mit der Last und kann verschiedene Konfigurationen haben (rund, D-Schnitt, Keil).
- Lager: Stützen Sie den Rotor für eine gleichmäßige und reibungsarme Drehung.
- Gehäuse: Schützt interne Komponenten und kann Montageflansche enthalten.
- Endkappen/Endstücke: Umschließen Sie die Enden des Motors und stützen Sie die Lager und die Welle.
ausgestattet mit Optionen
Integriert mit Treiber und Controller
- Ausgestattet mit integrierten Treibern und Controllern, was die Verkabelung vereinfacht und den Bedarf an externen Controllern reduziert.
- Vereinfachte Installation, reduzierter Verkabelungsaufwand und Platzersparnis für eine effiziente Integration.
Bremse
- Es ist mit elektromagnetischen Bremsen ausgestattet, um die Position der Motorwelle auch ohne Strom beizubehalten.
- Nützlich für vertikale Anwendungen oder sicherheitskritische Vorgänge.
Encoder
- Ausgestattet mit einem Encoder zur Rückmeldung, der eine präzise Positions- und Geschwindigkeitskontrolle ermöglicht.
- Verbesserte Genauigkeit und Fähigkeit, Positionsfehler zu erkennen und zu korrigieren.
Getriebe
- Ausgestattet mit Planeten- oder Stirnradgetrieben zur Erhöhung des Drehmoments und Verringerung der Drehzahl.
- Bietet ein höheres Drehmoment bei niedrigeren Drehzahlen und verbessert so die Leistung bei hoher Belastung.
Nach Bewegungstyp
Lineare Bewegung
- Hybrid-Linearantriebe nutzen Leitspindeln, Riemen oder andere Methoden, um eine lineare Bewegung zu erzielen.
- Kontrolle: Arbeitet im Allgemeinen im offenen Regelkreis.
- Präzision: Hohe Positioniergenauigkeit für lineare Verschiebung.
Rotationsbewegung
- Kombiniert ein hybrides Schrittmotordesign mit einem zusätzlichen Encoder und Servocontroller.
- Kontrolle: Geschlossener Regelkreis mit Echtzeit-Rückmeldung vom Encoder.
- Präzision: Sehr hohe Positioniergenauigkeit und Dynamik.
Von Advantage
Höhere Präzision
Hybrid-Schrittmotoren haben typischerweise kleinere Schrittwinkel (z. B. 0,9° oder 1,8°) und bieten im Vergleich zu PM-Schrittmotoren eine höhere Auflösung und präzisere Steuerung.
Höheres Drehmoment
Sie verfügen generell über mehr Drehmoment, insbesondere bei höheren Drehzahlen, was sie für anspruchsvolle Anwendungen qualifiziert.
Bessere Leistung bei hohen Geschwindigkeiten
Hybrid-Schrittmotoren erbringen bei höheren Geschwindigkeiten bessere Leistung, behalten ihr Drehmoment und ihren reibungslosen Betrieb bei.
Verbessertes Rastmoment
Sie verfügen über ein ausgezeichnetes Rastdrehmoment, das ihre Fähigkeit verbessert, eine Position zu halten, wenn die Stromversorgung abgeschaltet wird.
Geringe Vibration und Geräuschentwicklung
Hybrid-Schrittmotoren arbeiten im Vergleich zu PM Schrittmotoren typischerweise mit weniger Vibrationen und Geräuschen.
Verbesserte Effizienz
Ihr Design ermöglicht eine bessere Effizienz und Leistung in einem breiten Anwendungsbereich, vom Niedrig- bis zum Hochgeschwindigkeitsbetrieb.
Von 0 bis N - Komplettlösungen für Motoren
Ausgewählte Produkte
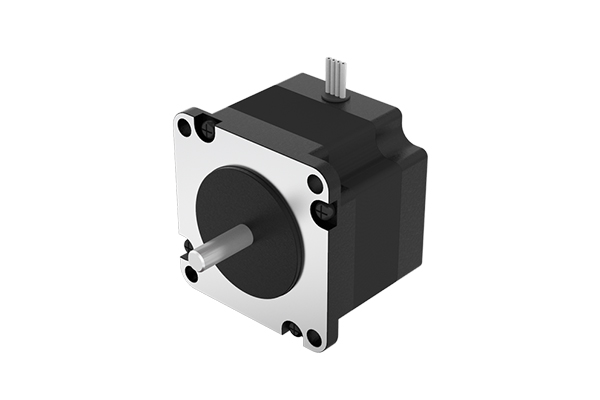
Serie 1
- Basisgröße: 57 mm (Nema 23)
- Länge: 41-76 mm
- Strom pro Phase: 2–2,8 A
- Haltedrehmoment: 0,39–1,8 Nm
- Schrittwinkel: 0,9 °
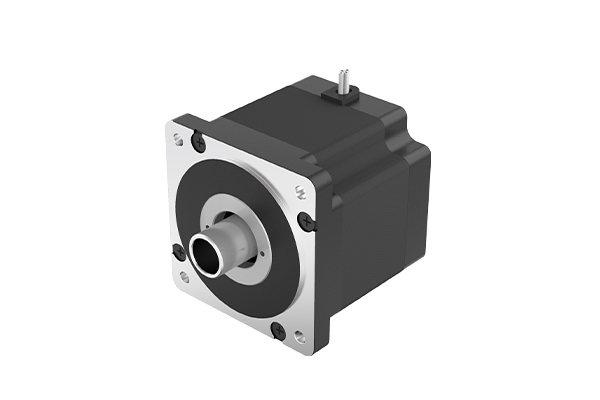
Serie 2
- Basisgröße: 86 mm (Nema 34)
- Länge: 63-150 mm
- Strom pro Phase: 6 A
- Haltedrehmoment: 3,5–12 Nm
- Schrittwinkel: 1,8°
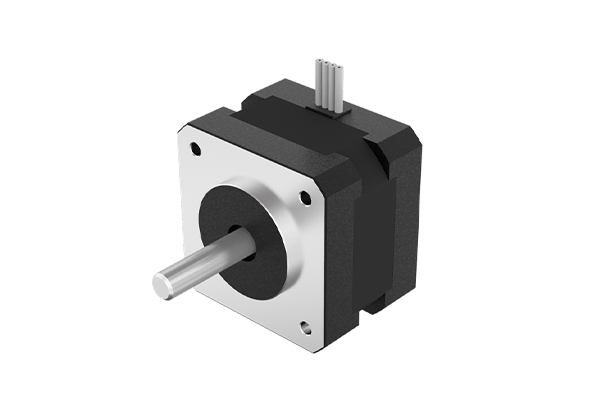
Serie 3
- Basisgröße: 35 mm (Nema 14)
- Länge: 20-26 mm
- Strom pro Phase: 0,5–1 A
- Haltedrehmoment: 0,05–0,09 Nm
- Schrittwinkel: 0,9°
Anwendungen

CNC-Maschinen: In CNC-Maschinen werden häufig Hybrid-Schrittmotoren eingesetzt, um eine präzise Steuerung der Platzierung von Werkstücken und Schneidwerkzeugen zu erreichen.
3D-Drucker: Sie bieten die Präzision und Wiederholbarkeit, die für einen präzisen 3D-Druck erforderlich sind.

Medizinische Geräte: Wird in medizinischen Geräten für Anwendungen verwendet, die eine präzise Positionierung erfordern, wie etwa in automatisierten Arzneimittelabgabesystemen und Diagnosegeräten.

Industrielle Automatisierung: Hybrid-Schrittmotoren werden in verschiedenen industriellen Automatisierungssystemen zur Steuerung von Förderbändern, Roboterarmen und Fließbändern eingesetzt.

Robotik: Hochpräzise Roboteranwendungen, einschließlich Roboterarmen und fahrerlosen Transportfahrzeugen (AGVs), verwenden häufig Hybrid-Schrittmotoren.

Luft- und Raumfahrt:In der Luft- und Raumfahrt werden Hybrid-Schrittmotoren zur präzisen Steuerung der Satellitenpositionierung und anderen kritischen Aufgaben eingesetzt.

Bühnenbeleuchtung und Effekte: Sie werden in Bühnenbeleuchtungs- und Effektgeräten verwendet, um die Bewegung und Positionierung von Lichtern und anderen Bühnenelementen zu steuern.

Optische Geräte: Hybrid schrittmotor werden in optischen Instrumenten und Kameras zur präzisen Linsenpositionierung und Fokussteuerung verwendet.
Häufig gestellte Fragen
Worin unterscheiden sich ein hybrider Linearantrieb und ein herkömmlicher Hybrid-Schrittmotor hinsichtlich Anwendungsmöglichkeiten und Vorteilen?
Ein hybrider Linearantrieb wandelt für hochpräzise Aufgaben in CNC-Maschinen und 3D-Druckern eine Drehbewegung in eine Linearbewegung um, im Gegensatz zu herkömmlichen Hybrid-Schrittmotoren, die für Drehaufgaben in der Robotik und Automatisierung verwendet werden.
Welchen Einfluss hat der Schrittwinkel eines hybrid schrittmotor auf die Leistung?
Der Schrittwinkel bestimmt die Auflösung des Motors; kleinere Schrittwinkel (z. B. 0,9°) bieten eine höhere Präzision und gleichmäßigere Bewegung, während größere Schrittwinkel (z. B. 1,8°) eine schnellere Bewegung, aber eine geringere Auflösung ermöglichen.
Welche Vorteile bietet die Verwendung von Hybrid-Schrittmotoren gegenüber Permanentmagnet-Schrittmotoren?
Der Schrittwinkel bestimmt die Auflösung; kleinere Winkel (z. B. 0,9°) bieten eine höhere Präzision, während größere Winkel (z. B. 1,8°) eine schnellere Bewegung ermöglichen.
Können hybrid schrittmotor Mikroschritte unterstützen?
Ja, hybrid schrittmotor sind zu Mikroschritten fähig, bei denen jeder volle Schritt in kleinere Schritte unterteilt wird, um eine bessere Kontrolle und sanftere Bewegung zu ermöglichen.
Wie erreichen hybrid schrittmotor eine präzise Positionierung ohne Rückkopplungssysteme?
Hybrid schrittmotor erreichen eine präzise Positionierung durch kontrollierte Aktivierung der Statorwicklungen, wodurch sich der Rotor in diskreten Schritten bewegt, die genau vorhergesagt und gesteuert werden können.
Was bedeutet die IP65-Zertifizierung für Hybrid-Schrittmotoren?
In schwierigen Situationen kann ein Motor mit IP65-Zertifizierung eingesetzt werden, da er beständig gegen Niederdruck-Wasserstrahlen und staubdicht ist.
Welche Vorteile bieten integrierte Treiber und Controller für Hybrid-Schrittmotoren?
Integrierte Treiber und Controller vereinfachen die Installation, reduzieren den Verkabelungsaufwand und verbessern die Gesamtzuverlässigkeit des Systems, indem sie optimale Kompatibilität zwischen Motor und Treiber sicherstellen.
Welche Wartungspraktiken werden für hybrid schrittmotor empfohlen?
Zu den empfohlenen Wartungsarbeiten gehören Inspektion, Reinigung, Schmierung, Überprüfung der Anschlüsse, Überwachung der Temperatur sowie Sicherstellung der Ausrichtung und des Lastmanagements.
