Als Schrittmotoren bekannte Elektromotoren werden häufig in Anwendungen eingesetzt, die eine genaue Kontrolle über Drehposition, Geschwindigkeit und Richtung erfordern. Sie unterscheiden sich von herkömmlichen Gleichstrommotoren dadurch, dass sie sich in diskreten Schritten bewegen und so eine feinere Kontrolle über die Bewegung des Motors ermöglichen.
Was ist ein Schrittmotor?
Jeder Schritt ist eine Winkeldrehung der Motorwelle, und der Motor kann so gesteuert werden, dass er sich um eine festgelegte Anzahl von Schritten dreht. Diese Motoren sind so ausgelegt, dass sie sich um einen festen Betrag drehen, normalerweise im Bereich von 0,9° bis 1,8° pro Schritt, je nach Motorkonstruktion.
Die Fähigkeit von Schrittmotoren, eine Feinsteuerung ohne Rückkopplungssysteme zu erreichen, ist ihr Hauptvorteil gegenüber anderen Motortypen (wie z. B. bürstenbehafteten Gleichstrommotoren). Schrittmotoren werden normalerweise gesteuert, indem eine Folge elektrischer Impulse an die Wicklungen des Motors gesendet wird, wobei jeder Impuls den Motor einen Schritt vorwärts oder rückwärts bewegt.
Arten von Schrittmotoren
Bevor wir uns mit Steuerungstechniken befassen, ist es wichtig, die verschiedenen Arten von Schrittmotoren zu verstehen, da sie die Art und Weise beeinflussen, wie der Motor gesteuert wird:
Schrittmotoren mit Permanentmagnet (PM):
- Mit einem Permanentmagneten im Rotor bieten diese Motoren ein höheres Drehmoment und eine höhere Effizienz bei reduzierten Geschwindigkeiten.
- Sie sind die häufigste Art von Schrittmotoren und ideal für Anwendungen mit niedriger Geschwindigkeit.
Schrittmotoren mit variabler Reluktanz (VR):
- Bei diesen Motoren besteht der Rotor aus Weicheisen und die Bewegung des Rotors wird durch die magnetischen Reluktanzänderungen gesteuert, wenn der Stator mit Strom versorgt wird.
- Im Vergleich zu PM-Motoren haben sie ein geringeres Drehmoment, aber eine bessere Geschwindigkeitsfähigkeit.
Hybrid-Schrittmotoren:
- Diese kombinieren die Eigenschaften von VR- und PM-Schrittmotoren. Hohes Drehmoment, Genauigkeit und Geschwindigkeit werden durch sie ausgeglichen.
- Hybrid-Schrittmotoren werden am häufigsten in industriellen Anwendungen eingesetzt.
Grundprinzipien der Schrittmotorsteuerung
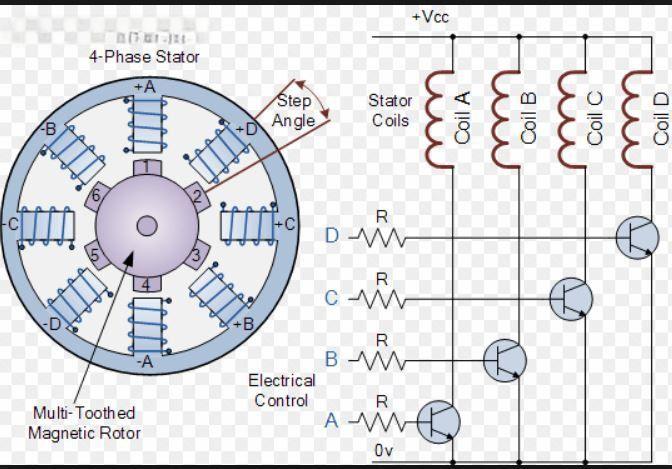
Schrittmotoren basieren auf einer Reihe von Wicklungen, die in einem Stator angeordnet sind, um Magnetfelder zu erzeugen. Die Bewegung wird durch die Interaktion dieser Felder mit dem Rotor oder dem rotierenden Bauteil erzeugt. Normalerweise bewegt sich der Rotor mit einem Permanentmagneten oder einem Stück Weicheisen schrittweise, wenn die Statorwicklungen in einer bestimmten Reihenfolge aktiviert werden.
Bei der Steuerung eines Schrittmotors müssen mehrere Schlüsselkonzepte verstanden werden:
Schrittwinkel:
Der Schrittwinkel definiert, wie weit sich der Rotor bei jedem Schritt bewegt. Wenn ein Schrittmotor beispielsweise einen Schrittwinkel von 1,8° hat, bewegt sich der Rotor des Motors bei jedem Impuls um 1,8°.
Die Gesamtdrehung des Motors kann ermittelt werden, indem 360° durch den Schrittwinkel geteilt wird. Ein Motor mit einem Schrittwinkel von 1,8° würde beispielsweise 200 Schritte für eine vollständige Umdrehung benötigen (360° / 1,8° = 200 Schritte).
Schrittmodi:
Schrittmotoren können in verschiedenen Modi angetrieben werden, je nachdem, wie die Spulen aktiviert werden:
- Vollschritt: Der Motor wird so aktiviert, dass jeder Schritt den Rotor um den vollen Schrittwinkel bewegt.
- Halbschritt: Der Motor bewegt sich in kleineren Schritten, was eine sanftere Bewegung und eine höhere Auflösung ermöglicht.
- Mikroschritt: Dies ist der fortschrittlichste Modus, bei dem die Spulen des Motors so aktiviert werden, dass sich der Rotor in sehr kleinen Schritten bewegt. Dies ermöglicht eine sehr feine Steuerung und gleichmäßige Bewegung.
Phase und Spule:
- Ein Schrittmotor besteht aus mehreren Phasen oder Spulen. Durch die Aktivierung dieser Spulen in der richtigen Reihenfolge wird der Rotor gezwungen, sich schrittweise zu bewegen.
- Beispielsweise dreht sich der Rotor bei einem Zweiphasen-Schrittmotor in einzelnen Schritten aufgrund des Magnetfelds, das durch die Aktivierung der Spulen in einer bestimmten Reihenfolge erzeugt wird.
Methoden zur Steuerung eines Schrittmotors
Es gibt mehrere Möglichkeiten, einen Schrittmotor zu steuern, jede mit ihren eigenen Vor- und Nachteilen. Die gewählte Methode hängt von der Anwendung, der erforderlichen Präzision und der verfügbaren Hardware ab.
Verwendung eines Mikrocontrollers (z. B. Arduino)
Schrittmotoren werden häufig von Mikrocontrollern gesteuert. Sie erzeugen die erforderlichen Impulssignale, die an die Treiberschaltung des Motors übertragen werden, die den Strom reguliert, der durch die Spulen des Motors fließt. Diese Technik wird häufig bei kleinen Maschinen und Heimwerkerprojekten angewendet.
Beispielsweise kann ein Arduino einen Schrittmotor mithilfe einer Bibliothek wie AccelStepper steuern. Der Arduino sendet eine Reihe digitaler Impulse an den Motortreiber, und der Treiber liefert die entsprechende Spannung und Stromstärke an die Motorspulen.
Einfaches Arduino-Codebeispiel:
#include
<Stepper.h>
const int stepsPerRevolution = 200; // Change this to match your motor’s specification // Initialize the Stepper library with the number of steps per revolution
Stepper stepper(stepsPerRevolution, 8, 9, 10, 11); void setup() {
// Set the motor speed (in RPM)
stepper.setSpeed(60);
} void loop() {
// Move the motor 100 steps forward
stepper.step(100);
delay(1000); // Move the motor 100 steps backward
stepper.step(-100);
delay(1000);
}
Verwendung eines dedizierten Schrittmotortreibers
Sie können den Stromfluss zu den Schrittmotorspulen mithilfe einer speziellen Schaltung steuern, die als Schrittmotortreiber bezeichnet wird, wie etwa dem A4988 oder DRV8825. Diese Treiber können nicht nur die höheren Ströme verarbeiten, die Schrittmotoren benötigen, sondern bieten auch Mikroschrittfunktionen für flüssigere Bewegungen. Beispielsweise können ein Arduino oder andere Mikrocontroller mit einem Treiber wie dem A4988 kombiniert werden, um den Schrittmotor über Impulssignale zu steuern. Der Mikrocontroller erzeugt ein Signal, und der Treiber steuert die Spulen des Motors entsprechend diesem Signal.
Grundlegende Verdrahtung für einen A4988-Treiber mit einem Arduino:
- VDD zu Arduino 5 V
- GND zu Arduino GND
- STEP zu einem digitalen Arduino-Pin (z. B. Pin 3)
- DIR zu einem digitalen Arduino-Pin (z. B. Pin 4)
- VMOT zu einer Motorstromversorgung
- M0-, M1-, M2-Pins für Mikroschritteinstellungen (optional)
Verwendung eines Computers oder einer SPS (speicherprogrammierbare Steuerung)
Für industrielle und komplexere Anwendungen können Schrittmotoren von einem Computer mit Steuersoftware oder einer SPS gesteuert werden. Diese Konfiguration ist bei CNC-Maschinen und automatisierten Systemen üblich, bei denen eine Steuerung auf höherer Ebene für mehrere Motoren und präzise Bewegungen erforderlich ist.
Steuerung mit einer Stromversorgung
Neben den Treibern ist die Stromversorgung eine Schlüsselkomponente bei der Steuerung von Schrittmotoren. Die Spannungs- und Stromspezifikationen von Motor und Treiber müssen übereinstimmen, da eine falsche Stromversorgung zu Überhitzung, Drehmomentverlust und Schäden am Motor führen kann.
Steuersignale und Timing
- Pulsrate (Frequenz): Die Frequenz des Pulssignals bestimmt die Geschwindigkeit des Motors. Eine schnellere Bewegung ist mit einer höheren Frequenz verbunden, während eine langsamere Bewegung mit einer niedrigeren Frequenz verbunden ist.
- Richtungssteuerung: Bei vielen Treibern steuert der DIR-Pin die Drehrichtung. Durch Ändern des Status dieses Pins (HIGH oder LOW) wird die Drehung des Motors umgekehrt.
Übersichtstabelle zur Steuerung von Schrittmotoren
| Steuerungsmethode | Vorteile | Nachteile |
| Mikrocontroller | Günstig, einfach, leicht zu programmieren | Begrenzte Leistungskapazität |
| Dedizierter Schrittmotor-Treiber | Zuverlässig, handhabt höhere Leistung, Mikrostep-Unterstützung | Komplexere Verkabelung, zusätzliche Kosten |
| PLC/Computer-basierte Steuerung | Hohe Präzision, skalierbar für große Systeme | Teuer, komplexe Einrichtung |
| Stromversorgungssteuerung | Einfach, funktioniert für einfache Anwendungen | Begrenzte Funktionalität, keine fortgeschrittene Steuerung |
Wichtige Überlegungen bei der Steuerung eines Schrittmotors
- Strombedarf: Schrittmotoren benötigen mehr Strom als normale Gleichstrommotoren, insbesondere wenn sie unter Last stehen oder mit hoher Geschwindigkeit laufen. Um Schäden zu vermeiden, verwenden Sie immer ein Netzteil, das mit den Anforderungen des Motors kompatibel ist.
- Wärmeableitung: Schrittmotoren neigen dazu, heiß zu werden, insbesondere unter hoher Last. Wenn Ihr Motor über längere Zeit läuft, stellen Sie sicher, dass er ausreichend belüftet ist, oder ziehen Sie den Einbau von Kühlkörpern oder Lüftern in Erwägung.
- Mikroschritt: Während Vollschritt dem Motor sein höchstes Drehmoment verleiht, bietet Mikroschritt eine sanftere Bewegung und höhere Präzision, allerdings bei reduziertem Drehmoment. Bei der Wahl Ihres Steuerungsansatzes ist es wichtig, die Kompromisse zu verstehen.
Fazit
Das Verhalten eines Schrittmotors zu verstehen und die beste Steuerungsstrategie für Ihre Anwendung auszuwählen, ist für die Steuerung unerlässlich. Ob Sie einen Mikrocontroller wie Arduino, einen dedizierten Treiber wie den A4988 oder fortschrittlichere Industriesysteme verwenden, Schrittmotoren bieten eine hervorragende Kontrolle über Position und Geschwindigkeit, ohne dass Rückkopplungssysteme erforderlich sind. Durch die Wahl der richtigen Kombination aus Stromversorgung, Treibern und Steuersignalen können Sie einen präzisen und zuverlässigen Betrieb für Ihr Projekt erreichen.