Los motores de CC sin escobillas y sin ranuras (BLDC) han ganado popularidad en todas las industrias debido a su funcionamiento suave, bajo nivel de ruido, alta eficiencia y diseño compacto. Sin embargo, seleccionar el motor BLDC sin ranuras adecuado para su aplicación puede ser una tarea difícil dada la variedad de opciones disponibles. Esta guía lo guía a través de los factores críticos a considerar al elegir el motor BLDC sin ranuras adecuado para satisfacer sus requisitos específicos.
Tipos de motores de CC sin escobillas y sin ranuras (BLDC)
Los motores de CC sin escobillas y sin ranuras son una categoría especializada de motores BLDC conocidos por su alta eficiencia, funcionamiento suave y diseños livianos. A diferencia de los motores ranurados, estos motores no tienen ranuras en el estator, lo que reduce el par de torsión y mejora el rendimiento en aplicaciones que requieren precisión y confiabilidad. Aquí hay una descripción general de los principales tipos de motores BLDC sin ranuras:
Motores BLDC sin ranuras y sin núcleo
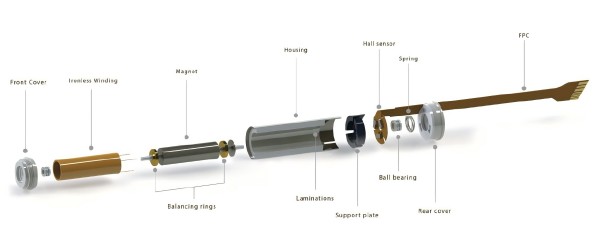
Los motores BLDC sin ranuras y sin núcleo eliminan el núcleo de hierro laminado tradicional que se encuentra en los motores estándar. En cambio, sus bobinados están enrollados en una estructura de panal o cesta, sostenida por un material ligero y no magnético.
Características principales:
- Baja inercia: capacidad de respuesta excepcional debido a la ausencia de un núcleo de hierro.
- Diseño eficiente: las pérdidas reducidas por corrientes parásitas mejoran la eficiencia.
- Tamaño compacto: ideal para aplicaciones con limitaciones de espacio.
Aplicaciones:
- Robótica de precisión, dispositivos médicos y escáneres de alta velocidad.


Motores BLDC sin ranuras Outrunner
En comparación con los motores inrunner, los motores sin ranuras Outrunner tienen un diámetro mayor y más par, ya que su rotor está ubicado alrededor del estator.
Características principales:
- Alta densidad de par: el mayor diámetro del rotor produce más par a velocidades más bajas.
- Funcionamiento suave: par de torsión reducido para un rendimiento sin vibraciones.
Eficiencia térmica:
- Mejor disipación del calor debido a la estructura del rotor exterior.
Aplicaciones:
- Drones, bicicletas eléctricas y sistemas de automatización industrial.




Motores BLDC sin ranuras con rotor interno
Debido a que el rotor de un motor sin ranuras con rotor interno está alojado dentro del estator, es más compacto y adecuado para aplicaciones de alta velocidad.
Características principales:
- Capacidad de alta velocidad: diseñado para usos que requieren velocidades de rotación rápidas.
- Factor de forma compacto: tamaño pequeño y diseño liviano.
- Control preciso: funcionamiento suave con mínima interferencia electromagnética.
Aplicaciones:
- Vehículos RC, bombas centrífugas y herramientas de precisión.




Motores BLDC sin ranuras con rotor interno
Los motores sin ranuras con rotor interno tienen un diseño plano, similar a un disco, lo que los hace muy compactos y adecuados para aplicaciones que requieren un perfil delgado.
Características principales:
- Factor de forma delgado: ideal para aplicaciones donde la altura es limitada.
- Diseño axial: transferencia de potencia eficiente debido a la orientación del flujo axial.
- Peso liviano: uso reducido de material sin comprometer el rendimiento.
Aplicaciones:
- Sistemas aeroespaciales, robótica e instrumentos de precisión.
Motores BLDC sin ranuras de flujo axial
Los motores de flujo axial utilizan una ruta de flujo magnético alineada a lo largo del eje del motor en lugar de radialmente. Su diseño sin ranuras mejora la eficiencia y reduce las pérdidas.
Características principales:
- Alta eficiencia: la ruta magnética optimizada minimiza las pérdidas.
- Diseño compacto: permite la integración en lugares confinados.
- Configuraciones flexibles: adecuados para aplicaciones de alto par y baja velocidad.
Aplicaciones:
- Vehículos eléctricos, turbinas eólicas y maquinaria industrial compacta.
Motores BLDC sin ranuras de flujo radial
En los motores de flujo radial, el eje de rotación es perpendicular al flujo magnético. Su diseño sin ranuras reduce el ruido y la vibración.
Características principales:
- Optimización del par: excelente rendimiento en rangos de velocidad media a alta.
- Bajo nivel de ruido: la configuración sin ranuras minimiza el ruido electromagnético.
- Amplia gama de tamaños: personalizable para diversas aplicaciones.
Aplicaciones:
- Sistemas de HVAC, sistemas automotrices y equipos de automatización.
Comprenda los requisitos de su aplicación
El primer paso para elegir el motor adecuado es definir claramente las necesidades de su aplicación. Tenga en cuenta lo siguiente:
Características de la carga
- Requisitos de par: determine el par de arranque, el par de funcionamiento y el par máximo necesarios para su aplicación.
- Rango de velocidad: comprenda el rango de velocidad de funcionamiento (RPM) requerido, incluidas las velocidades máximas y mínimas.
- Inercia de la carga: conozca la inercia de la carga, ya que afecta la capacidad del motor para arrancar, detenerse y dar marcha atrás rápidamente.
Condiciones ambientales
- Entorno operativo: ¿Se utilizará el motor en temperaturas extremas, condiciones húmedas o entornos con polvo o residuos? Seleccione un motor que tenga las clasificaciones de protección de entrada (IP) adecuadas.
- Gestión térmica: si la aplicación genera calor, es posible que necesite motores con mecanismos de refrigeración eficientes o protecciones térmicas.
Restricciones de espacio y peso
- Los motores BLDC sin ranuras son conocidos por su compacidad. Evalúe si es necesario un factor de forma más pequeño o un motor más liviano para su diseño.
Especificaciones del motor para evaluar
Al comparar motores, concéntrese en estas especificaciones clave:
Potencia nominal
- Determine la potencia (en vatios o kilovatios) requerida para su aplicación. Esta es una combinación del par y la velocidad.
Eficiencia
- Los motores BLDC sin ranuras son altamente eficientes, pero la clasificación de eficiencia exacta puede variar. Una mayor eficiencia significa una menor pérdida de potencia y un mejor rendimiento térmico.
Requisitos de voltaje y corriente
- Asegúrese de que su fuente de energía pueda satisfacer las necesidades de voltaje y corriente del motor.
Ondulación de par
- Una de las ventajas significativas de los motores BLDC sin ranuras es la falta de par de torsión, lo que genera una ondulación de par mínima. Elija un motor con características de baja ondulación verificadas si el funcionamiento suave es fundamental.
Curva de velocidad-par
- Evalúe las características de velocidad-par del motor para asegurarse de que pueda proporcionar un par constante en todo el rango de velocidad deseado.
Resistencia térmica
- Asegúrese de que el motor pueda soportar el calor generado durante el funcionamiento, especialmente si se utiliza en aplicaciones de alta potencia o ciclos de trabajo continuos.

Compatibilidad del controlador
Los motores BLDC sin ranuras requieren controladores electrónicos para la conmutación y el funcionamiento. Verifique la compatibilidad del motor con los controladores disponibles:
Control con sensor frente a control sin sensor
- Motores basados en sensor: utilice sensores de efecto Hall o codificadores para un control preciso de la posición y la velocidad, adecuado para aplicaciones que requieren alta precisión.
- Motores sin sensor: dependen de la retroalimentación de fuerza contraelectromotriz (EMF), que es perfecta para sistemas más simples y menos costosos.
Características del controlador
- Busque características como configuraciones programables, protección contra sobrecarga y protocolos de comunicación (por ejemplo, CAN, UART o SPI) que coincidan con los requisitos de su sistema.

Evaluación de la calidad de construcción y los materiales
Los materiales y la construcción del motor afectan directamente su rendimiento y durabilidad:
Material del imán
- Los motores con imanes de tierras raras (por ejemplo, neodimio) proporcionan un alto par y eficiencia, pero tienen un costo más alto. Los imanes de ferrita son más asequibles, pero pueden tener un rendimiento menor.
Diseño del devanado
- Evalúe la calidad de los devanados del estator. Los devanados de cobre de alta calidad garantizan un mejor rendimiento y durabilidad.
Diseño del rotor
- Elija entre configuraciones de rotor interno o rotor externo según las necesidades de la aplicación. Los diseños de rotor externo son comunes en drones y estabilizadores debido a su mayor inercia y estabilidad.
Consideraciones de diseño para motores BLDC sin ranuras
Al diseñar o seleccionar un motor BLDC sin ranuras, tenga en cuenta lo siguiente:
- Técnicas de devanado: un devanado y una colocación cuidadosos son esenciales para lograr un rendimiento óptimo.
- Compatibilidad del controlador: en particular con respecto a las clasificaciones de voltaje y corriente, el controlador del motor debe estar en línea con las especificaciones del motor.
- Gestión térmica: incorpore soluciones de refrigeración como disipadores de calor o refrigeración activa si la aplicación implica un uso prolongado.
- Selección de materiales: utilice imanes y materiales de bobinado de alta calidad para garantizar la durabilidad y la eficiencia.
- Relación coste-beneficio: evalúe si los beneficios de un diseño sin ranuras justifican el mayor coste inicial para su aplicación.
Evalúe las compensaciones entre coste y rendimiento
Los motores BLDC sin ranuras suelen ser más caros que sus homólogos con ranuras debido a su diseño avanzado y a la complejidad de su fabricación. Para justificar el coste:
- Asegúrese de que la aplicación exija beneficios como bajo nivel de ruido, alta eficiencia o par de torsión cero.
- En lugar de centrarse únicamente en el gasto original, tenga en cuenta el coste total de propiedad, que incluye el mantenimiento y la eficacia operativa.
Consulte con fabricantes y proveedores
- En caso de duda, consulte con los fabricantes o proveedores para asegurarse de elegir el motor adecuado para su aplicación. Prepárese para analizar los aspectos específicos de su proyecto, como:
- Los requisitos de rendimiento necesarios
- Las condiciones de funcionamiento
- Las limitaciones de diseño (tamaño, peso u opciones de montaje)
Compare las características principales con una matriz de decisión
Cree una matriz de decisión para comparar los motores potenciales según sus criterios. A continuación, se muestra una matriz de ejemplo para evaluar tres motores:
| Criterios | Motor A | Motor B | Motor C |
| Potencia (W) | 500 | 450 | 600 |
| Eficiencia (%) | 92 | 89 | 94 |
| Ruido (dB) | 25 | 30 | 22 |
| Costo ($) | 300 | 250 | 350 |
| Ondulación de par | Baja | Media | Baja |
| Resistencia térmica | Buena | Promedio | Excelente |
Errores comunes que se deben evitar
- Subestimar las necesidades de par: tenga siempre en cuenta el par de arranque y el par máximo para evitar sobrecargar el motor.
- Descuidar la compatibilidad del controlador: asegúrese de que el controlador admita las necesidades de voltaje, corriente y comunicación del motor.
- Ignorar la gestión térmica: los motores sin ranuras pueden requerir soluciones de refrigeración adicionales para aplicaciones de alta potencia o de servicio continuo.
Estudio de caso: selección de un motor para una aplicación de drones
Requisitos de la aplicación:
- Funcionamiento suave para la estabilización de la cámara
- Ligero y compacto
- Alto par a bajas RPM para un control preciso
Motor elegido: un motor BLDC sin ranuras con:
- Diseño de rotor externo para mayor estabilidad
- Baja ondulación del par para un funcionamiento suave
- Clasificaciones de alta eficiencia para conservar la energía de la batería
Conclusión
La elección del motor BLDC sin ranuras adecuado implica una evaluación detallada de los requisitos de la aplicación, las especificaciones del motor y las compensaciones de rendimiento. Puede seleccionar un motor que satisfaga sus necesidades específicas centrándose en factores clave como el par, la velocidad, la eficiencia y la compatibilidad del controlador. La colaboración con los fabricantes o el uso de una matriz de decisiones pueden simplificar el proceso de selección. Con el motor BLDC sin ranuras adecuado, su proyecto se beneficiará de un funcionamiento suave, bajo nivel de ruido y un rendimiento confiable, lo que garantiza el éxito en aplicaciones exigentes.