Los motores paso a paso son un componente crucial en las aplicaciones de control de precisión, ya que ofrecen un movimiento y un posicionamiento precisos mediante movimientos incrementales. Entre los diferentes tipos de motores paso a paso, el motor paso a paso de imán permanente (PM) y el motor paso a paso de reluctancia variable (VR) se destacan por sus estructuras y principios operativos únicos.
Tipos de motores paso a paso
Los motores paso a paso convierten los pulsos eléctricos en rotación mecánica, lo que permite un control preciso del movimiento sin necesidad de sistemas de retroalimentación. Los siguientes son los principales tipos de motores paso a paso:
- Motores paso a paso de imán permanente (PM): estos motores utilizan imanes permanentes en el rotor para producir pasos discretos.
- Motores paso a paso de reluctancia variable (VR): estos motores funcionan utilizando reluctancia magnética en lugar de imanes permanentes en el rotor.
- Motores paso a paso híbridos: una combinación de diseños PM y VR, que ofrece una precisión mejorada. Sin embargo, desde la perspectiva de un controlador, los híbridos son similares a los motores paso a paso de imán permanente.
Diferencias clave entre los motores paso a paso de imán permanente y los motores paso a paso de imán permanente
| Aspecto | Motor paso a paso de imán permanente (PMSM) | Motor paso a paso de reluctancia variable (VRSM) |
| Composición del rotor | Imán permanente | Núcleo de hierro dulce |
| Principio de funcionamiento | Interacción magnética entre el campo del estator y los polos del rotor | El rotor se alinea para minimizar la reluctancia magnética |
| Par de retención | Alto debido al campo magnético permanente | Más bajo, depende de la atracción magnética |
| Precisión de paso | Alto, normalmente proporciona un funcionamiento más suave y una resolución más alta | Más bajo, debido a la dependencia de la alineación de reluctancia magnética |
| Par de retención | Presente (el motor mantiene su posición sin corriente) | Ausente (el rotor puede girar libremente cuando no está energizado) |
| Costo | Más alto debido al uso de imanes permanentes | Más bajo, construcción más simple sin imanes permanentes |
| Aplicaciones | Se utiliza en aplicaciones que requieren alta precisión y par | Adecuado para aplicaciones que necesitan un control de movimiento más simple a un menor Costo |
| Relación par-inercia | Generalmente alto, lo que lo hace eficaz para una aceleración y desaceleración rápidas | Más bajo, por lo que es menos adecuado para aplicaciones de alta velocidad |
Diferencias estructurales
Comprender la estructura de estos motores proporciona información sobre sus comportamientos operativos.
Motor Paso A Paso de Iman Permanente
Los imanes permanentes integrados en el rotor de los motores paso a paso de imán permanente interactúan con el campo electromagnético del estator. Este diseño le da al rotor un efecto de “detención”, lo que significa que tiende a permanecer en posiciones fijas incluso cuando no está encendido. El movimiento del rotor se siente engranado o con muescas cuando se gira manualmente, debido a la atracción magnética entre el rotor y los polos del estator.
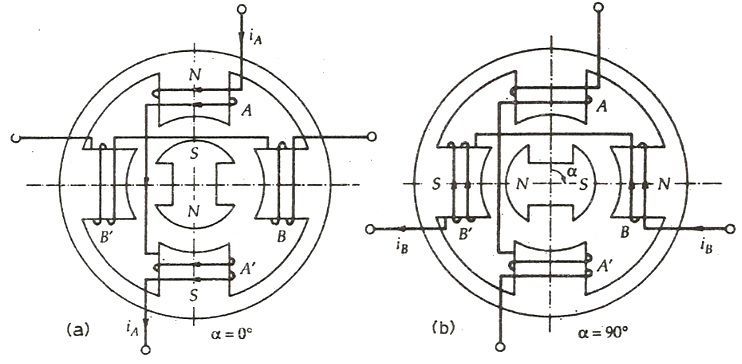
Configuración del devanado:
- Normalmente, tiene dos devanados separados, ya sea con o sin una toma central.
- Se puede identificar con un ohmímetro, ya que mostrará dos devanados separados sin un retorno común.
Resolución angular:
- Los motores paso a paso de imán permanente pueden lograr resoluciones de paso más finas, que a menudo van desde 1,8 grados por paso hasta incluso 0,72 grados por paso, según el modelo y la configuración.
Motor paso a paso de reluctancia variable
Sin embargo, el rotor de los motores paso a paso VR no tiene imanes permanentes. En cambio, el rotor está hecho de hierro dulce o material ferromagnético que se alinea con los polos del estator cuando se energiza, lo que minimiza la reluctancia magnética y crea un movimiento de rotación. Sin energía, los motores VR generalmente giran con más libertad, con solo una ligera resistencia debido a la magnetización residual en el rotor.
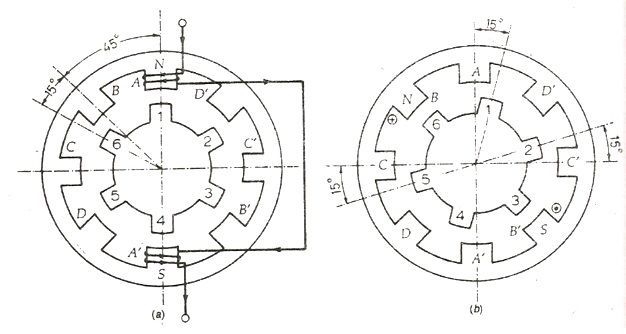
Configuración de bobinado:
- Los motores VR suelen tener tres o cuatro bobinados, con un retorno común. Esto se puede confirmar con un ohmímetro, ya que mostrará varios bobinados que comparten una única ruta de retorno.
Resolución angular:
- Los motores paso a paso VR generalmente tienen ángulos de paso más gruesos en comparación con los motores paso a paso PM. El ángulo de paso típico para los motores VR es más alto, como 15 o 30 grados por paso, lo que limita su resolución para aplicaciones que requieren un control más preciso.
Identificación de motores paso a paso PM y VR
Si falta la etiqueta de un motor paso a paso, se puede diferenciar entre motores paso a paso PM y VR mediante observaciones y pruebas sencillas: para probar el rotor manualmente, gírelo con los dedos.
- Motor paso a paso PM: el rotor se siente engranado o con muescas debido a la atracción magnética de los imanes permanentes.
- Motor paso a paso VR: el rotor gira más libremente, con una resistencia mínima.
Prueba del ohmímetro: examine la configuración del devanado con un ohmímetro.
- Motor paso a paso PM: normalmente tiene dos devanados independientes.
- Motor paso a paso VR: normalmente tiene tres o cuatro devanados con un retorno común compartido.
Operación y par de retención
Tanto los motores paso a paso PM como VR bloquean el rotor en su lugar en un ángulo fijo cuando se energiza al menos un devanado. Este par de retención es crucial para aplicaciones en las que el motor debe mantener su posición mientras está estacionario.
- Motores paso a paso PM: proporcionan un mayor par de retención como resultado del contacto magnético de los imanes permanentes del estator y el rotor. Este par de retención permite que el motor resista fuerzas externas hasta un cierto punto antes de que se exceda el par.
- Motores paso a paso VR: tienen un par de retención menor en comparación con los motores paso a paso PM, ya que el rotor carece de imanes permanentes. El efecto de retención se produce únicamente por los polos del estator energizados que se alinean con los dientes del rotor.
Resolución angular y micropasos
Los motores paso a paso pueden variar ampliamente en su resolución de paso. La elección entre un motor paso a paso PM y un motor paso a paso VR a menudo depende de la precisión requerida:
- Motores paso a paso PM: generalmente proporcionan resoluciones de paso más finas, como 1,8 o 0,72 grados por paso. Con controladores avanzados, los motores PM pueden funcionar en modos de medio paso o micropaso, lo que permite pasos aún más pequeños y un movimiento más suave.
- Motores paso a paso VR: generalmente ofrecen ángulos de paso más gruesos, como 15 o 30 grados por paso, lo que limita su uso en aplicaciones de alta precisión.
Aplicaciones e idoneidad
La elección entre motores paso a paso de imán permanente y de imán permanente depende de las necesidades específicas de la aplicación:
Motores paso a paso de imán permanente
Ventajas:
- Alta precisión con Resoluciones de paso más pequeñas.
- Son adecuadas para aplicaciones que necesitan una alta precisión posicional debido a su mayor par de retención.
Limitaciones:
- Son más intrincados y posiblemente más costosos que los motores VR.
Casos de uso:
- Impresoras, robótica e instrumentos de precisión donde el movimiento suave y controlado es esencial.
Motores paso a paso de reluctancia variable
Ventajas:
- Construcción más simple, que a menudo resulta en menores costos.
- Configuraciones de bobinado menos complejas en comparación con los diseños híbridos.
Limitaciones:
- Son menos adecuadas para aplicaciones de alta precisión debido a su resolución de paso más gruesa y par de retención más débil.
- La rotación libre sin energía puede ser una desventaja en aplicaciones que requieren retención estacionaria.
Abordar los desafíos y mejorar el rendimiento
Para ambos tipos de motores, garantizar un rendimiento óptimo puede implicar ajustes y mejoras:
Mejorar el rendimiento del motor paso a paso
- Motores paso a paso de imán permanente: utilice controladores de micropasos para lograr un funcionamiento más suave y tamaños de paso más pequeños. Esto reduce la posibilidad de resonancia a bajas velocidades y permite un control más preciso del movimiento.
- Motores paso a paso VR: se combinan con controladores bien adaptados que pueden optimizar la distribución del par para un funcionamiento más suave.
Manejo de carga y requisitos de par
- Motores PM: asegúrese de que el par del motor sea suficiente para la carga que necesita mover. Las aplicaciones de alta carga pueden beneficiarse de motores con clasificaciones de par más altas o mecanismos de reducción de engranajes.
- Motores VR: elija motores paso a paso VR para aplicaciones con requisitos de par más bajos, ya que su diseño más simple puede ser más rentable.
Conclusión
Si bien los motores paso a paso de imán permanente y los motores paso a paso de reluctancia variable sirven como soluciones efectivas para el control del movimiento, sus diferentes características los hacen adecuados para distintos tipos de aplicaciones. Los fabricantes de motores paso a paso destacan que los motores paso a paso PM brindan mayor precisión, mejor par de retención y una resolución de paso más fina, lo que los convierte en una opción ideal para tareas de precisión. Por el contrario, los motores paso a paso VR son más fáciles de usar y menos costosos, lo que los hace apropiados para usos donde el par y la resolución altos no son esenciales.