Cuando se habla de motores utilizados en diversas aplicaciones mecánicas y electrónicas, se mencionan con frecuencia tanto los motores paso a paso como los motores de corriente continua. Si bien los motores paso a paso son técnicamente un tipo de motor de corriente continua, su diseño, funcionamiento y aplicación difieren significativamente de los motores de corriente continua tradicionales. Comprender estas diferencias es esencial para los ingenieros, aficionados y técnicos que buscan seleccionar el motor adecuado para sus proyectos.
Motor paso a paso: un subtipo de motor de corriente continua
Es fundamental establecer que los motores paso a paso son un subconjunto de los motores de CC antes de explorar las distinciones. Tanto los motores paso a paso como los motores de CC convencionales funcionan con corriente continua (CC), lo que significa que están alimentados por electricidad que fluye en una sola dirección. Sin embargo, sus estructuras y métodos de funcionamiento difieren, lo que da lugar a características y usos distintos. Un tipo específico de motor de CC llamado motor paso a paso está hecho para moverse en pasos distintos. A diferencia de los motores de CC convencionales que giran continuamente, los motores paso a paso avanzan de forma incremental en ángulos precisos (pasos) cuando se aplican pulsos eléctricos. Los motores paso a paso son perfectos para aplicaciones que necesitan un movimiento de precisión debido a su movimiento por pasos, que permite un control exacto de la posición.
¿Cómo funcionan los motores paso a paso y los motores de corriente continua?
Para comprender las diferencias entre los motores paso a paso y los motores de CC, es importante examinar cómo funciona cada tipo de motor.
Funcionamiento del motor paso a paso
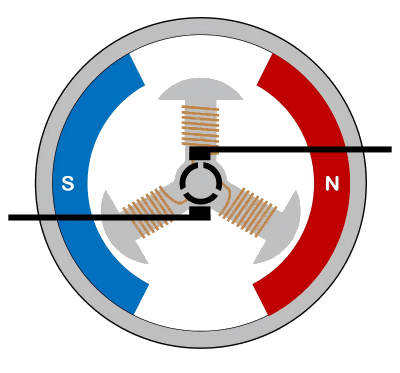
Un motor paso a paso consta de un rotor (un núcleo magnético o ferromagnético) rodeado de múltiples bobinas de estator dispuestas en fases. Estas bobinas proporcionan campos magnéticos que atraen o repelen el rotor, lo que hace que se mueva de forma incremental, según el orden en que se energizan. Una parte de una rotación completa está representada por cada paso, que normalmente varía de 1,8° a 15°. La activación secuencial de las bobinas se puede controlar mediante un controlador de motor paso a paso o un microcontrolador, lo que permite que el motor se mueva con precisión en pasos predeterminados.
Las características clave de los motores paso a paso incluyen:
- Movimiento discreto: el control preciso de la posición y la rotación es posible porque los motores paso a paso se mueven en pasos.
- Alto par de retención: cuando un motor paso a paso no está girando, puede mantener su posición con un alto par.
- Control por pulsos: los motores paso a paso funcionan obteniendo pulsos de corriente que especifican la cantidad de pasos y la dirección del movimiento.
Funcionamiento del motor de corriente continua
Por otro lado, los motores de corriente continua convencionales funcionan según principios más simples. Un motor de corriente continua normalmente tiene un rotor (inducido) y un estator que crea un campo magnético constante. Cuando se aplica voltaje a los terminales, la corriente fluye a través de los devanados del inducido, creando un campo magnético que interactúa con el campo magnético del estator. Esta interacción crea un par motor, lo que hace que el rotor gire continuamente.
Las características clave de los motores de CC incluyen:
- Rotación continua: los motores de CC rotan continuamente cuando reciben energía, lo que los hace adecuados para aplicaciones que requieren un movimiento suave y continuo.
- Operación simple: son fáciles de controlar y, a menudo, solo requieren una fuente de alimentación variable o un controlador de motor para regular la velocidad.
- Alta velocidad: los motores de CC pueden alcanzar altas velocidades, lo que puede ser útil en aplicaciones como ventiladores, bombas y otros sistemas mecánicos.
Motores paso a paso vs. motores de corriente continua
A pesar de que ambos funcionan con corriente continua, los motores paso a paso y los motores de CC difieren significativamente en estructura, mecanismos de control y aplicaciones. La siguiente es una lista de las principales distinciones entre estos dos tipos de motores:
A. Movimiento y posicionamiento
Motor paso a paso: la capacidad de moverse en incrementos exactos e incrementales es lo que distingue a un motor paso a paso. Por ello, los motores paso a paso son ideales para dispositivos como brazos robóticos, máquinas CNC e impresoras 3D que necesitan un posicionamiento preciso. Dado que la cantidad de pulsos que se le dan al motor determina cuánto movimiento realiza, los motores paso a paso no necesitan sistemas de retroalimentación para permanecer en su lugar. Motor de CC: un motor de CC convencional ofrece una rotación continua y es más adecuado para aplicaciones en las que se requiere un movimiento suave e ininterrumpido, como en cintas transportadoras y accionamientos mecánicos simples. Con frecuencia se necesita un mecanismo de retroalimentación externo, como un potenciómetro o un codificador, para el control de posición con motores de CC a fin de rastrear y modificar la posición.
B. Control de velocidad
Motor paso a paso: Al alterar la frecuencia del pulso de entrada, los motores paso a paso pueden lograr un control preciso de la velocidad. Sin embargo, su velocidad máxima es generalmente menor que la de los motores de CC y el par disminuye a medida que aumenta la velocidad. Los motores paso a paso funcionan bien en situaciones que requieren tanto un movimiento de precisión como un control de la velocidad.
Motor de CC: Los motores de CC se destacan en el funcionamiento a alta velocidad y son relativamente simples de controlar para la regulación de la velocidad. La modulación por ancho de pulso (PWM) o el cambio del voltaje de entrada se pueden utilizar para ajustar la velocidad. Los motores de CC mantienen el par mejor a altas velocidades en comparación con los motores paso a paso.
C. Par y potencia
Motor paso a paso: Una de las ventajas de los motores paso a paso es su capacidad de mantener un par alto a bajas velocidades, lo que los hace ideales para mantener una posición firmemente incluso sin una rotación continua. Este alto par de retención es especialmente útil en aplicaciones donde se necesita mantener una posición estacionaria bajo carga.
Motor de CC: Los motores de CC pueden proporcionar un par alto a altas velocidades, pero su par generalmente disminuye a medida que el motor disminuye su velocidad. Si bien se pueden modificar con sistemas de engranajes para aumentar el par, no tienen la capacidad inherente de mantener el par cuando están estacionarios sin un control adicional.
D. Complejidad y control
Motor paso a paso: el sistema de control de los motores paso a paso es más complejo que el de los motores de CC. Los motores paso a paso requieren controladores o controladores especializados que envíen secuencias de pulsos para girar el motor en pasos específicos. Sin embargo, esta complejidad permite un control más exacto del movimiento y la ubicación. Motor de CC: los motores de CC son más simples de controlar, ya que solo necesitan una fuente de energía y, opcionalmente, un controlador o controlador de motor para ajustar la velocidad. El control de dirección se puede gestionar con un circuito de puente en H simple, lo que los hace más fáciles de implementar para aplicaciones básicas.
E. Retroalimentación y precisión
Motor paso a paso: los motores paso a paso tienen la ventaja de no requerir dispositivos de retroalimentación para la colocación en bucle abierto. La posición precisa está determinada por la cantidad de pulsos, lo que garantiza un alto nivel de precisión. Sin embargo, sin un sistema de bucle cerrado, existe el riesgo de que se pierdan pasos en condiciones de carga pesada o alta velocidad. Motor de CC: para un posicionamiento preciso, los motores de CC suelen requerir un sistema de retroalimentación, como un codificador, que proporcione información sobre la posición o la velocidad del motor. Este control de bucle cerrado garantiza una mayor precisión y corrige cualquier desviación durante el funcionamiento.
A continuación se muestra el siguiente cuadro comparativo:
| Característica | Motor paso a paso | Motor de corriente continua |
| Movimiento | Se mueve con pasos precisos | Rotación continua |
| Control | Requiere un controlador complejo para el control de pulsos | Control sencillo con fuente de alimentación |
| Posicionamiento | Alta precisión sin retroalimentación | Necesita retroalimentación para un posicionamiento preciso |
| Esfuerzo de torsión | Alto par a baja velocidad | Alto par a alta velocidad |
| Velocidad | Bajar la velocidad máxima | Mayor velocidad máxima |
| Par de retención | Mantiene la posición cuando está parado | Requiere energía para mantener la posición |
| Solicitud | Tareas de precisión (por ejemplo, impresoras 3D, CNC) | Tareas de alta velocidad (por ejemplo, ventiladores, bombas) |
Adecuación de la aplicación
La elección de un motor paso a paso o un motor de corriente continua dependerá de los requisitos específicos de la aplicación: los motores paso a paso funcionan mejor en situaciones que requieren un control exacto del posicionamiento y el movimiento. Algunos ejemplos comunes son:
- Impresión 3D: garantiza un movimiento preciso del cabezal de la impresora.
- Máquinas CNC: proporciona un posicionamiento exacto de la herramienta.
- Brazos robóticos: permite un movimiento controlado para operaciones de selección y colocación.
Los motores de corriente continua son perfectos para aplicaciones que necesitan una rotación continua y suave sin un gran énfasis en la precisión. Se utilizan comúnmente en:
- Ventiladores y sopladores: proporcionan un flujo de aire constante.
- Vehículos eléctricos: ofrecen una propulsión suave y eficiente.
- Cintas transportadoras: garantizan un movimiento constante para la manipulación de materiales.
Si bien los motores paso a paso son un subtipo de motores de CC, sus características únicas los distinguen de los motores de CC tradicionales. Debido a que pueden moverse en incrementos distintos, los fabricantes de motores paso a paso crean estos motores para que funcionen excepcionalmente bien en situaciones que requieren un control y un posicionamiento precisos. Por otro lado, los motores de CC convencionales son más fáciles de usar y son más adecuados para tareas de rotación continua a alta velocidad.