Fabricante de Mini Motores Electricos
Nos especializamos en el diseño y la fabricación de una gama de motores en miniatura de bajo voltaje, incluidos motores de CC con escobillas y sin escobillas, motores paso a paso y servomotores, con integración de codificador opcional. Estos motores son compactos, livianos, energéticamente eficientes y están diseñados para minimizar la interferencia electromagnética, lo que los hace fáciles de usar en una variedad de aplicaciones.
Los parámetros que podemos proporcionar son los siguientes, podemos proporcionar especificaciones más personalizadas si tiene alguna en mente:
- Tamaño: Longitud: 5 mm-150 mm, Diámetro: 4 mm-100 mm
- Voltaje: 1,5 V-24 V
- Peso: 5g-150g
- RPM: 300rpm-50000rpm
Home / Mini Motores Electricos
Por tamaño
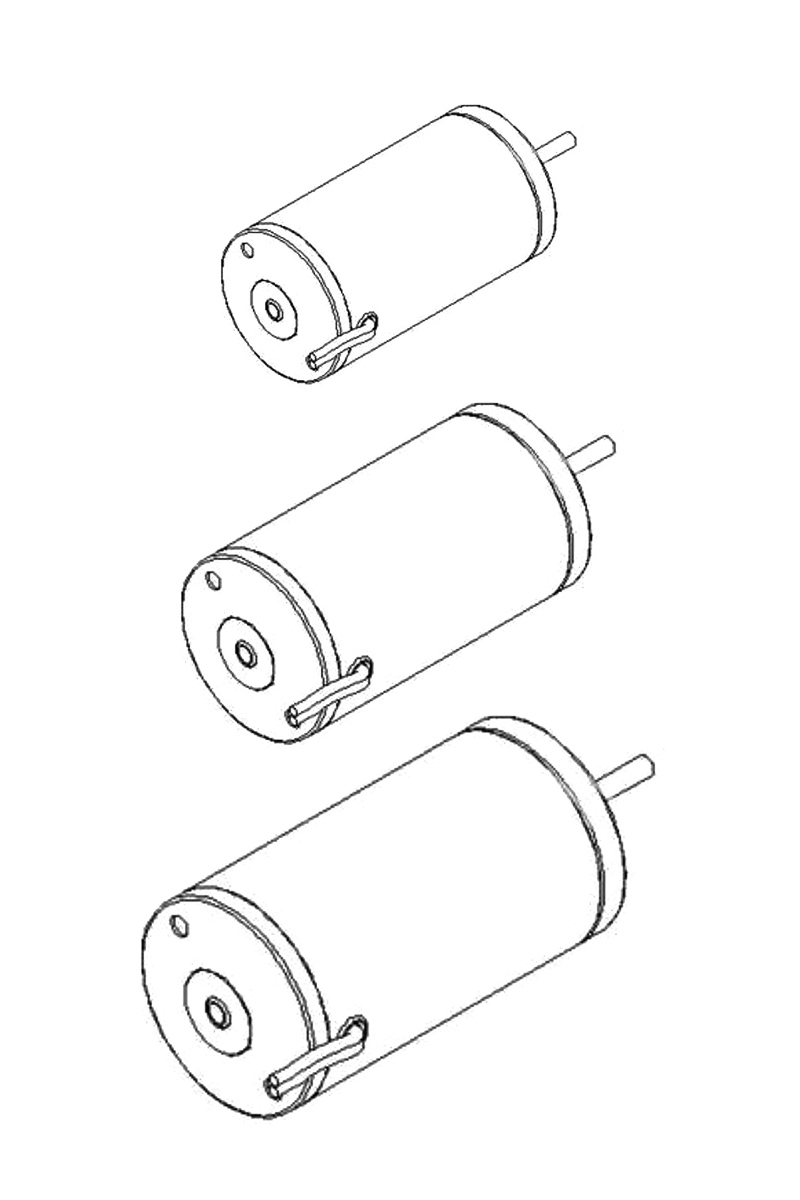
Los motores en miniatura vienen en una variedad de tamaños, generalmente diseñados para ser compactos y usarse en dispositivos pequeños. Si tiene requisitos personalizados, puede comunicarse con nosotros y enviarnos planos.
Diámetro: 4 mm a 12 mm
- El diámetro de la carcasa del motor, generalmente medido en el punto más ancho del cuerpo cilíndrico.
- El diámetro del motor suele determinar su capacidad de potencia y su par motor. Los diámetros más pequeños son adecuados para usos de baja potencia, mientras que los más grandes proporcionan un par motor más alto.
Longitud: 10 mm a 25 mm
- La longitud del cuerpo del motor desde la base hasta el extremo, excluyendo el eje.
- La longitud de un mini motores electricos está estrechamente relacionada con su potencia y torque, ya que un motor más largo puede albergar devanados e imanes más extensos.
Diámetro del eje: 0,8 mm a 2 mm
- El diámetro del eje de salida del motor transmite el movimiento de rotación a los componentes conectados.
- Los diámetros de eje más grandes (hasta 2 mm) son más resistentes, lo que permite utilizar accesorios más robustos y manejar cargas más elevadas.
Longitud del eje: 5 mm a 10 mm
- La longitud del eje de salida que sobresale del cuerpo del motor.
- La longitud del eje determina la facilidad con la que el motor se puede conectar a componentes externos. Un eje más largo proporciona versatilidad para el montaje y la alineación con otros componentes.
A continuación se muestran algunos tamaños comunes para nuestros micromotores.
 |
4mm x 8mm (Tamaño N10) | Común en mini dispositivos vibratorios o diseños ultracompactos. |
| 6mm x 12mm (Tamaño N20) | Se utiliza a menudo en robótica y pequeños proyectos de electrónica. | |
| 8mm x 16mm (Tamaño N30) | Un poco más grande, proporciona más torque para robótica pequeña. | |
| 10mm x 20mm (Tamaño N40) | Ofrece más potencia y se utiliza en mini-robots y proyectos de modelismo. | |
| 15mm x 25mm | Se utiliza en aplicaciones de aficionados ligeramente más grandes que aún requieren motores compactos. | |
| 16mm x 30mm | Común en herramientas pequeñas o sistemas compactos de alto torque. |
Por Actualidad
Ofrecemos motores miniatura de CA y CC, ideales para diversas aplicaciones que requieren precisión, eficiencia y diseño compacto.

Corriente Alterna
- Funciona con corriente alterna (CA).
- Los micromotores de CA se utilizan más comúnmente en aplicaciones estacionarias o de uso continuo con una fuente de alimentación estable, ofreciendo un funcionamiento suave y eficiente a velocidades constantes.
Corriente Continua
- Funciona con corriente continua (CC).
- Los micromotores de CC se prefieren para dispositivos portátiles que funcionan con baterías donde la facilidad de control de velocidad, el diseño liviano y la rentabilidad son cruciales.
De 0 a N - Soluciones integrales de motor
Por el método de conmutación
Ambos tipos de motores utilizan inducción electromagnética para el movimiento rotacional y se diferencian en las escobillas frente a los controladores electrónicos.
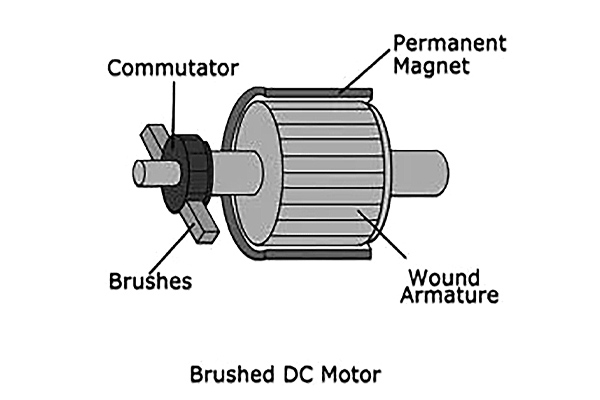
Cepillado
- Los micromotores con escobillas utilizan escobillas para transferir corriente a los devanados del rotor, lo que genera una menor eficiencia debido a la fricción. Su vida útil es más corta, generalmente de entre 1000 y 10 000 horas, debido al desgaste de las escobillas.
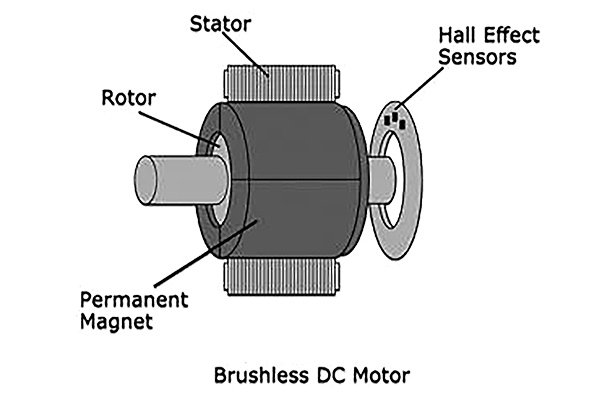
Sin escobillas
- Los motores sin escobillas no requieren escobillas físicas porque emplean un controlador electrónico para gestionar la corriente que fluye a través de los devanados del estator. Esto da como resultado una mayor eficiencia (80-90%) y una vida útil mucho más larga, que a menudo supera las 20.000 horas, debido a la ausencia de desgaste de las escobillas.
Por tipo
Los micromotores sin núcleo, paso a paso y servomotores convierten la energía eléctrica en movimiento mecánico, son compactos, funcionan con CC y generan torque de forma electromagnética.

Micromotor sin núcleo
- El rotor utiliza una bobina liviana en lugar de un núcleo de metal. Utiliza escobillas y conmutador, con una aceleración más rápida debido a un rotor más liviano.
- Voltaje: 1,5 V - 24 V
- Velocidad: 700 - 30.000 RPM
- Par motor: 0,1 - 100 mN·m
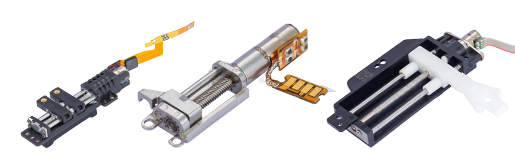
Micromotor paso a paso
- Dividen la rotación en pasos, y los micropasos proporcionan un movimiento más suave y una mayor precisión al energizar las bobinas en secuencia para lograr un movimiento fraccionado.
- Voltaje: 2V - 12V
- Velocidad: 100 - 10.000 RPM
- Precisión: 1,8° por paso

Micromotor servo
- Utilizan mecanismos de retroalimentación y señales PWM para controlar con precisión la posición angular, ajustándose a través de un bucle de retroalimentación para lograr precisión.
- Voltaje: 4,8 V - 24 V
- Velocidad: 0,1 a 0,2 segundos por cada rotación de 60°
- Rotación: Normalmente 180°, pero existen modelos de rotación continua.
Comparación de 3 tipos de micromotores
|
Característica |
Micromotor sin núcleo |
Micromotor paso a paso |
Micromotor servo |
|
Design |
DC con escobillas y rotor ligero |
Bobinas múltiples y pasos discretos |
Corriente continua escobillada con bucle de retroalimentación |
|
Operación |
Velocidad constante, controlada por voltaje |
Rotación paso a paso controlada por pulsos |
Control de posicionamiento mediante señal PWM |
|
Precisión |
Moderado |
Alta precisión |
Precisión moderada, típicamente 1,5°/paso |
|
Velocidad |
Alta velocidad (hasta 30.000 RPM) |
Velocidad más lenta (normalmente entre 1000 y 10 000 RPM) |
Moderado (típicamente 0.1 – 0.2 s / 60 °) |
|
Esfuerzo de torsión |
Moderado |
Alto par a bajas velocidades |
Baja a moderada (hasta 2 N·m) |
Aplicaciones

Electrónica de Consumo
- Motor de microvibración: se utiliza en teléfonos móviles, controladores de juegos y otros dispositivos portátiles para retroalimentación háptica (alertas de vibración).
- Ventiladores pequeños: en sistemas de enfriamiento para computadoras, portátiles y dispositivos electrónicos portátiles.
- Estabilización de cámara: para controlar cardanes y enfoque de lentes en cámaras digitales y teléfonos inteligentes.

Robótica
- Actuadores: En robots pequeños, brazos robóticos, drones y juguetes, donde se requiere un control preciso del movimiento.
- Servomotores: Para controlar la posición de las articulaciones, ruedas u otras partes móviles de un robot en un sistema robótico.
- Micro Robots: Robots en miniatura para fines médicos, militares o de investigación, donde el espacio y el peso son críticos.

Dispositivos médicos
- Bombas en miniatura: para sistemas de administración de medicamentos, bombas de insulina o dispositivos de transferencia de fluidos a pequeña escala.
- Equipo dental: Los micromotores se utilizan en taladros dentales, herramientas de limpieza y otras herramientas de precisión.
- Instrumentos quirúrgicos: En cirugía robótica o herramientas de precisión utilizadas para microcirugías.

Automotor
- Actuadores eléctricos: para controlar pequeñas funciones en vehículos como ajustes de asientos, espejos o elevalunas.
- Bombas pequeñas: Para sistemas de combustible o sistemas de enfriamiento.
- Sensores y sistemas de control: Micromotores en sensores o dispositivos que requieren un movimiento pequeño pero eficiente para realizar mediciones precisas.
Industrial y Automatización
- Microbombas: En la gestión de fluidos industriales o procesos químicos.
- Accionamientos de precisión: para máquinas automatizadas de pequeña escala, como impresoras 3D, máquinas CNC o sistemas de transporte.
- Sistemas de vibración: para probar equipos o simular condiciones del mundo real.

Aeroespacial
- Drones: Los mini motores electricos proporcionan propulsión y control a vehículos aéreos no tripulados (UAV) de pequeña escala.
- Equipos Satelitales: Se utilizan en actuadores para antenas o superficies de control en sistemas satelitales compactos.
- Micropropulsores: En aplicaciones aeroespaciales para un control fino en la navegación de naves espaciales.
