La estructura del motor CC sin escobillas
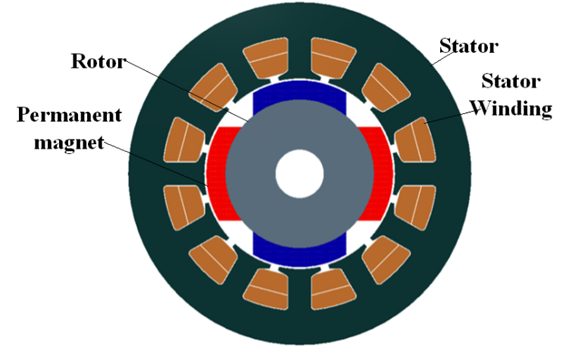
Rotor
- Imanes permanentes: el rotor de un motor BLDC contiene imanes permanentes, generalmente fabricados con materiales de tierras raras como el neodimio, dispuestos alrededor de su circunferencia.
- Polos del imán: el rotor puede tener múltiples polos (por ejemplo, 2 polos, 4 polos), que afectan las características de par y velocidad del motor.
- Posición (Outrunner vs. Inrunner): en un motor Outrunner, el rotor rodea el estator, lo que proporciona más par. En un motor Inrunner, el rotor está dentro del estator, lo que generalmente da como resultado velocidades más altas.
Estator
- Bobinas enrolladas: El estator está formado por bobinados hechos de alambre de cobre, que forman una serie de electroimanes. Estas bobinas se colocan en una configuración determinada para producir el campo magnético que interactúa con el rotor.
- Número de fases: La mayoría de los motores BLDC tienen un estator trifásico (tres juegos de bobinas), pero también pueden tener más fases según la aplicación.
- Material del núcleo: Para reducir las pérdidas por corrientes parásitas y aumentar la eficiencia, los núcleos del estator suelen estar compuestos de acero laminado.
- Ranuras y dientes: El estator tiene ranuras donde se colocan los bobinados y dientes para ayudar a dirigir el campo magnético generado por las bobinas.
Controlador electrónico de velocidad (ESC)
- Unidad de Control: El ESC es un dispositivo externo (pero parte integral del funcionamiento del motor) que gestiona la corriente que fluye a través de las bobinas del estator. Cumple la función de conmutación al cambiar electrónicamente las fases para mantener el motor en rotación.
- Modulación por Ancho de Pulso (PWM): El ESC modifica el ciclo de trabajo de la señal PWM transmitida al motor para modificar su velocidad.
Aspectos
- Soporte del rotor: los cojinetes se encuentran en ambos extremos del motor para sostener el eje del rotor y permitir una rotación suave. Los cojinetes de calidad superior son esenciales para reducir la fricción y prolongar la vida útil del motor.
- Lubricación: la lubricación adecuada de los cojinetes ayuda a un funcionamiento suave y reduce el desgaste.
Vivienda/Marco
- Encierra y protege los componentes: la carcasa o bastidor del motor mantiene el estator y el rotor en su lugar y protege los componentes internos del polvo, los residuos y las condiciones ambientales.
- Refrigeración: algunas carcasas están diseñadas para mejorar la refrigeración, ya sea de forma pasiva a través de rejillas de ventilación o con ventiladores incorporados.
Campanas de extremo (tapas de extremo)
- Soporte estructural: Las campanas de los extremos se colocan en ambos extremos del motor para sujetar los cojinetes y brindar soporte estructural. También ayudan a proteger los componentes internos del motor.
Principio de funcionamiento del motor de CC sin escobillas
El principio de funcionamiento del motor de CC sin escobillas es diferente al del motor de CC tradicional. Se logra el accionamiento sin escobillas mediante conmutación electrónica, eliminando así las escobillas de carbón y el conmutador del motor de CC tradicional. A continuación, se ofrece una explicación detallada del principio de funcionamiento del motor de CC sin escobillas:
- Estructura del motor: El motor de corriente continua sin escobillas se compone principalmente de un estator, un rotor y un sensor de posición. La parte fija del motor es el estator, que a menudo se compone de muchos devanados. El rotor del motor, que está en rotación, a menudo está construido de material de imán permanente.
- Conmutación electrónica: En un motor de corriente continua sin escobillas, un conmutador electrónico reemplaza al conmutador mecánico tradicional. El conmutador electrónico controla la dirección de la corriente en los devanados del motor a través de un circuito de control, logrando así la rotación continua del motor.
- Sensor de posición: La posición del rotor es administrada por el conmutador electrónico, que también modifica la dirección de la corriente cuando es necesario. El sensor de posición recopila esta información. Los sensores de posición comunes incluyen sensores Hall, sensores fotoeléctricos y sensores magnetoeléctricos.
- Estrategia de control: La estrategia de control de los motores de corriente continua sin escobillas generalmente adopta el control vectorial o el control trapezoidal. El control vectorial logra un control preciso del motor al controlar la amplitud y la fase de la corriente, mientras que el control trapezoidal logra un control básico del motor al controlar la conmutación de la corriente.
- Eficiencia y rendimiento: debido a la eliminación de escobillas de carbón y conmutadores, los motores de CC sin escobillas son más eficientes, funcionan con mayor suavidad, tienen menos ruido y menores costos de mantenimiento.
Diagrama de funcionamiento del motor CC sin escobillas
Los tipos de motores CC sin escobillas
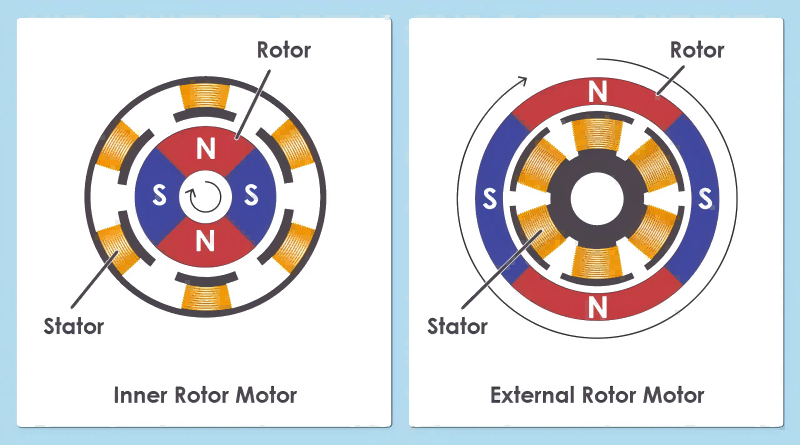
Motor de rotor externo:
El estator se encuentra dentro del motor, pero el rotor, que alberga los imanes, se encuentra en el exterior. Debido a su diseño, el par motor se puede aumentar a velocidades más bajas utilizando un diámetro de rotor más grande. Estos motores generalmente producen un par motor más alto debido a su mayor diámetro de rotor, lo que los hace ideales para aplicaciones que requieren un par motor significativo a velocidades más bajas, como drones, bicicletas eléctricas y aeromodelismo.
Motores BLDC Inrunner:
El estator rodea al rotor, que se encuentra dentro de la carcasa del motor. Este diseño es más compacto y, por lo general, genera velocidades más altas con menos par. Los motores Inrunner son conocidos por tener mayores RPM (revoluciones por minuto) y son más adecuados para aplicaciones donde la alta velocidad es esencial, como los autos RC o los motores eléctricos pequeños. El siguiente cuadro comparativo:
| Característica | Motores BLDC Outrunner | Motores BLDC Inrunner |
| Posición del rotor | Fuera del estator | Dentro del estator |
| Esfuerzo de torsión | Mayor torque por peso/tamaño | Menor par por peso/tamaño |
| Velocidad | Generalmente velocidad más baja | Generalmente mayor velocidad |
| Eficiencia | Ligeramente más bajo debido a más partes móviles. | Mayor eficiencia debido a menos partes móviles |
| Conmutación | Electrónico | Electrónico |
| Par de arranque | Buen par de arranque | Requiere mayor velocidad para generar torque |
Modo de accionamiento de motor CC sin escobillas
Conmutación de seis pasos (transmisión trapezoidal)
Este es el modo de accionamiento más común para motores BLDC, donde el motor es impulsado por señales de voltaje trifásicas que se aplican a los devanados del motor en una secuencia de seis pasos.
- Operación: En este modo, se energizan dos fases a la vez y la conmutación ocurre cada 60 grados eléctricos. Esto crea una forma de onda trapezoidal de fuerza contraelectromotriz.
- Ventajas: Fácil de implementar, rentable y ampliamente utilizado en muchas aplicaciones.
- Desventajas: Genera ondulación de par, que puede generar ruido y vibración, y un funcionamiento menos suave en comparación con el accionamiento sinusoidal.
Accionamiento sinusoidal
En este modo, el motor se acciona con formas de onda de voltaje sinusoidal en lugar de las formas de onda trapezoidales utilizadas en la conmutación de seis pasos.
- Operación: El accionamiento sinusoidal crea una transición más suave entre los pasos de conmutación, lo que da como resultado una salida de par más continua y uniforme.
- Ventajas: Produce un funcionamiento más uniforme con menos ondulación de par, menos ruido y menos vibración.
- Desventajas: Es más complejo y costoso de implementar debido a la necesidad de algoritmos de control precisos y retroalimentación de mayor resolución.
Control Orientado al Campo
También conocido como control vectorial, FOC es una técnica de control avanzada que optimiza la eficiencia y el rendimiento del motor BLDC al controlar las corrientes del motor en un marco de referencia giratorio.
- Operación: El FOC regula la corriente en dos direcciones perpendiculares (eje d y eje q), alineando el campo magnético del motor con la posición del rotor para maximizar el par y la eficiencia.
- Ventajas: Control altamente eficiente y preciso sobre el par y la velocidad, ideal para aplicaciones que requieren un rendimiento uniforme y preciso.
- Desventajas: Requiere algoritmos complejos y hardware sofisticado, lo que lo hace más costoso y difícil de implementar.
Control directo de par
DTC es un método que controla directamente el torque y el flujo magnético del motor sin necesidad de una transformación de coordenadas, a menudo utilizado en variadores de CA pero que también se puede aplicar a motores BLDC.
- Operación: El DTC utiliza un estimador de par y flujo y aplica vectores de voltaje al motor para controlar directamente el par y el flujo.
- Ventajas: Respuesta dinámica rápida, no requiere información precisa de la posición del rotor.
- Desventajas: Puede ser más complejo y puede resultar en una mayor ondulación del par en comparación con el FOC.
Control del modo actual
Este modo se centra en regular la corriente a través de los devanados del motor en lugar de controlar directamente el voltaje.
- Operación: Para obtener la velocidad o el par deseados, el controlador del motor modifica la corriente enviada a los devanados del motor, frecuentemente mediante el uso de bucles de retroalimentación.
- Ventajas: Proporciona un control preciso del par motor, ideal para aplicaciones que requieren una salida de par estable.
- Desventajas: Se requiere un sistema de control más complejo, lo que puede generar tiempos de respuesta más lentos en comparación con el control de voltaje directo.
Control sin sensores
En el control sin sensores, la posición del rotor se estima utilizando la fuerza contraelectromotriz generada por el propio motor, lo que elimina la necesidad de sensores físicos.
- Operación: El controlador estima la posición del rotor en función de los puntos de cruce por cero de la fuerza contraelectromotriz, que se utiliza para determinar la secuencia de conmutación adecuada.
- Ventajas: Reduce el costo y la complejidad asociados con los sensores y mejora la confiabilidad al eliminar los puntos de falla del sensor.
- Desventajas: Puede ser menos preciso, especialmente a bajas velocidades donde la fuerza contraelectromotriz es débil, lo que resulta en un control menos preciso.
Control por sensores
El control mediante sensores proporciona información en tiempo real sobre la posición del rotor utilizando sensores de efecto Hall u otros sensores de posición.
- Operación: Los sensores proporcionan datos precisos de la posición del rotor al controlador, que luego ajusta la secuencia de conmutación y la sincronización en consecuencia.
Ventajas: Proporciona un control preciso sobre el funcionamiento del motor, un rendimiento excelente a bajas velocidades y durante el arranque, ideal para aplicaciones que requieren un alto par a bajas velocidades.
Desventajas: Aumenta el costo y la complejidad del sistema del motor, posibles problemas de confiabilidad debido a fallas del sensor.
Consideraciones para la selección de motores CC sin escobillas
Al seleccionar un motor de CC sin escobillas (BLDC), se deben tener en cuenta varias consideraciones clave para garantizar que el motor cumpla con los requisitos de su aplicación específica.
Potencia del motor BLDC
Potencia (P) = Voltaje (V) × Corriente (I) × Eficiencia (%) × Factor de potencia (PF) Consideración: Determine la potencia máxima requerida para su aplicación, medida en vatios (W).
Consejo de selección: Elija un motor que pueda proporcionar suficiente potencia para cumplir con los requisitos de carga máxima. Asegúrese de que la potencia nominal continua del motor sea superior a la carga típica y que la potencia nominal máxima pueda soportar breves ráfagas de mayor demanda.
Velocidad del motor BLDC
Velocidad (RPM)=(Voltaje (V)×Kv)/n
- Consideración: Identifique la velocidad máxima (en revoluciones por minuto, RPM) necesaria para su aplicación.
Consejo de selección: Seleccione un motor que pueda alcanzar la velocidad máxima deseada. Asegúrese de que el rango de velocidad del motor se ajuste a los requisitos de su aplicación, considerando cualquier reducción de engranajes si es necesario.
Voltaje del motor BLDC
V=Kv⋅RPM
- Consideración: Determine el voltaje de funcionamiento que se utilizará para accionar el motor.
- Consejo de selección: Seleccione un motor que pueda funcionar sin problemas con el voltaje indicado. Verifique que el voltaje y la corriente que requiere el motor sean compatibles con su sistema y que su fuente de alimentación sea capaz de suministrarlos.
Tamaño del motor BLDC
- Consideración: evalúe las limitaciones de tamaño físico, incluido el diámetro, la longitud y el diámetro del eje del motor.
- Consejo de selección: seleccione un motor para su aplicación en función del espacio que ocupará. Considere la configuración de montaje del motor y asegúrese de que el diámetro del eje sea compatible con su configuración mecánica, como acoplamientos o engranajes.
Sensores Hall: con o sin
Consideración: Decida si el motor necesita tener sensores Hall o no. Consejo de selección:
- Con sensores Hall: elija un motor BLDC con sensores si el control preciso a bajas velocidades, el arranque suave o el posicionamiento preciso son fundamentales para su aplicación. Los sensores Hall brindan información en tiempo real sobre la posición del rotor, lo que mejora el control.
- Sin sensores Hall: opte por un motor BLDC sin sensores si necesita un diseño más simple y robusto donde el control preciso a bajas velocidades es menos crítico. Los motores sin sensores suelen ser menos costosos y tienen menos componentes.
Conclusión
Para muchas aplicaciones diferentes, un motor CC sin escobillas es la mejor opción debido a su gran eficiencia, confiabilidad y control preciso. Para un fabricante de motores de CC sin escobillas, la falta de escobillas reduce el mantenimiento y su diseño compacto ofrece un rendimiento potente. Comprender sus componentes, funcionamiento y beneficios es clave para optimizar su uso en soluciones de ingeniería modernas.