Les moteurs à courant continu sans balais et sans fentes (BLDC) ont gagné en popularité dans de nombreux secteurs en raison de leur fonctionnement fluide, de leur faible bruit, de leur rendement élevé et de leur conception compacte. Cependant, sélectionner le bon moteur BLDC sans fentes pour votre application peut être une tâche difficile compte tenu de la variété d’options disponibles. Ce guide vous présente les facteurs critiques à prendre en compte lors du choix du bon moteur BLDC sans fentes pour répondre à vos besoins spécifiques.
Types de moteurs à courant continu sans balais et sans fentes (BLDC)
Les moteurs à courant continu sans balais et sans fentes sont une catégorie spécialisée de moteurs BLDC connus pour leur rendement élevé, leur fonctionnement fluide et leur conception légère. Contrairement aux moteurs à fentes, ces moteurs n’ont pas de fentes dans le stator, ce qui réduit le couple de cogging et améliore les performances dans les applications nécessitant précision et fiabilité. Voici un aperçu des principaux types de moteurs BLDC sans fentes :
Moteurs BLDC sans noyau et sans fentes
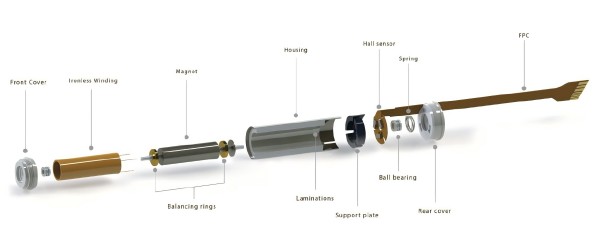
Les moteurs BLDC sans noyau et sans fentes éliminent le noyau en fer laminé traditionnel que l’on trouve dans les moteurs standard. Au lieu de cela, leurs enroulements sont enroulés dans une structure en nid d’abeille ou en panier, soutenue par un matériau léger et non magnétique.
Principales caractéristiques :
- Faible inertie : réactivité exceptionnelle grâce à l’absence de noyau de fer.
- Conception efficace : les pertes par courants de Foucault réduites améliorent l’efficacité.
- Taille compacte : idéale pour les applications à espace restreint.
Applications :
- Robotique de précision, appareils médicaux et scanners à grande vitesse.


Moteurs BLDC sans encoches à rotor externe
Par rapport aux moteurs à rotor interne, les moteurs sans encoches à rotor externe ont un diamètre plus grand et un couple plus élevé puisque leur rotor est positionné autour du stator.
Principales caractéristiques :
- Densité de couple élevée : le diamètre plus grand du rotor produit plus de couple à des vitesses plus faibles.
- Fonctionnement fluide : couple de denture réduit pour des performances sans vibrations.
Efficacité thermique :
- Meilleure dissipation de la chaleur grâce à la structure du rotor externe.
Applications :
- Drones, vélos électriques et systèmes d’automatisation industrielle.




Moteurs BLDC sans encoches à rotor interne
Étant donné que le rotor d’un moteur sans encoches à rotor interne est logé à l’intérieur du stator, il est plus compact et adapté aux applications à grande vitesse.
Principales caractéristiques :
- Capacité à grande vitesse : conçu pour les utilisations qui nécessitent des vitesses de rotation rapides.
- Format compact : petite taille et conception légère.
- Contrôle précis : fonctionnement fluide avec une interférence électromagnétique minimale.
Applications :
- Véhicules RC, pompes centrifuges et outils de précision.




Moteurs BLDC sans encoches Pancake
Les moteurs sans encoches Pancake présentent une conception plate en forme de disque, ce qui les rend très compacts et adaptés aux applications nécessitant un profil mince.
Principales caractéristiques :
- Format fin : idéal pour les applications où la hauteur est limitée.
- Conception axiale : transfert de puissance efficace grâce à l’orientation du flux axial.
- Léger : utilisation réduite de matériaux sans compromettre les performances.
Applications :
- Systèmes aérospatiaux, robotique et instruments de précision.
Moteurs BLDC sans encoches à flux axial
Les moteurs à flux axial utilisent un chemin de flux magnétique aligné le long de l’axe du moteur plutôt que radialement. Leur conception sans fente améliore l’efficacité et réduit les pertes.
Principales caractéristiques :
- Haute efficacité : le chemin magnétique optimisé minimise les pertes.
- Conception compacte : elle permet l’intégration dans des endroits confinés.
- Configurations flexibles : adaptées aux applications à couple élevé et à faible vitesse.
Applications :
- Véhicules électriques, éoliennes et machines industrielles compactes.
Moteurs BLDC sans fente à flux radial
Dans les moteurs à flux radial, l’axe de rotation est perpendiculaire au flux magnétique. Leur conception sans fente réduit le bruit et les vibrations.
Principales caractéristiques :
- Optimisation du couple : excellentes performances dans les plages de vitesse moyenne à élevée.
- Faible bruit : la configuration sans fente minimise le bruit électromagnétique.
- Large gamme de tailles : personnalisable pour diverses applications.
Applications :
- Systèmes CVC, systèmes automobiles et équipements d’automatisation.
Comprendre les exigences de votre application
La première étape pour choisir le bon moteur consiste à définir clairement les besoins de votre application. Tenez compte des éléments suivants :
Caractéristiques de charge
- Exigences de couple : déterminez le couple de démarrage, le couple de fonctionnement et le couple de pointe nécessaires à votre application.
- Plage de vitesse : comprenez la plage de vitesse de fonctionnement (tr/min) requise, y compris les vitesses maximales et minimales.
- Inertie de la charge : connaissez l’inertie de la charge, car elle a un impact sur la capacité du moteur à démarrer, à s’arrêter et à reculer rapidement.
Conditions environnementales
- Environnement de fonctionnement : le moteur sera-t-il utilisé dans des températures extrêmes, des conditions humides ou des environnements poussiéreux ou avec des débris ? Sélectionnez un moteur doté des indices de protection IP (Ingress Protection) appropriés.
- Gestion thermique : si l’application génère de la chaleur, vous aurez peut-être besoin de moteurs dotés de mécanismes de refroidissement efficaces ou de protections thermiques.
Contraintes d’espace et de poids
- Les moteurs BLDC sans fente sont connus pour leur compacité. Évaluez si un facteur de forme plus petit ou un moteur plus léger est nécessaire pour votre conception.
Spécifications du moteur à évaluer
Lorsque vous comparez des moteurs, concentrez-vous sur ces spécifications clés :
Puissance nominale
- Déterminez la puissance (en watts ou en kilowatts) requise pour votre application. Il s’agit d’une combinaison du couple et de la vitesse.
Efficacité
- Les moteurs BLDC sans fente sont très efficaces, mais l’indice d’efficacité exact peut varier. Une efficacité plus élevée signifie une perte de puissance réduite et de meilleures performances thermiques.
Exigences en matière de tension et de courant
- Assurez-vous que votre source d’alimentation peut répondre aux besoins en tension et en courant du moteur.
Ondulation de couple
- L’un des avantages significatifs des moteurs BLDC sans fente est l’absence de couple de cogging, ce qui entraîne une ondulation de couple minimale. Choisissez un moteur avec des caractéristiques de faible ondulation vérifiées si un fonctionnement fluide est essentiel.
Courbe vitesse-couple
- Évaluez les caractéristiques vitesse-couple du moteur pour vous assurer qu’il peut fournir un couple constant sur toute la plage de vitesses souhaitée.
Résistance thermique
- Assurez-vous que le moteur peut gérer la chaleur générée pendant le fonctionnement, en particulier s’il est utilisé dans des applications à haute puissance ou des cycles de service continus.

Compatibilité du contrôleur
Les moteurs BLDC sans fente nécessitent des contrôleurs électroniques pour la commutation et le fonctionnement. Vérifiez la compatibilité du moteur avec les contrôleurs disponibles :
Contrôle par capteur ou sans capteur
- Moteurs à capteur : utilisez des capteurs à effet Hall ou des encodeurs pour un contrôle précis de la position et de la vitesse, adaptés aux applications nécessitant une grande précision.
- Moteurs sans capteur : dépendent de la rétroaction de la force contre-électromotrice (FEM), ce qui est parfait pour les systèmes plus simples et moins coûteux.
Caractéristiques du contrôleur
- Vérifiez les fonctionnalités telles que les paramètres programmables, la protection contre les surcharges et les protocoles de communication (par exemple, CAN, UART ou SPI) qui correspondent aux exigences de votre système.

Évaluer la qualité de fabrication et les matériaux
Les matériaux et la construction du moteur affectent directement ses performances et sa durabilité :
Matériau de l’aimant
- Les moteurs dotés d’aimants en terres rares (par exemple, en néodyme) offrent un couple et une efficacité élevés, mais sont plus coûteux. Les aimants en ferrite sont plus abordables, mais peuvent avoir des performances inférieures.
Conception de l’enroulement
- Évaluez la qualité des enroulements du stator. Les enroulements en cuivre de haute qualité garantissent de meilleures performances et une meilleure durabilité.
Conception du rotor
- Choisissez entre les configurations à rotor interne ou à rotor externe en fonction des besoins de l’application. Les conceptions à rotor externe sont courantes dans les drones et les cardans en raison de leur inertie et de leur stabilité plus élevées.
Considérations de conception pour les moteurs BLDC sans fente
Lors de la conception ou de la sélection d’un moteur BLDC sans fente, tenez compte des éléments suivants :
- Techniques d’enroulement : un enroulement et un placement soigneux sont essentiels pour obtenir des performances optimales.
- Compatibilité du contrôleur : en particulier en ce qui concerne les valeurs nominales de tension et de courant, le contrôleur du moteur doit être conforme aux spécifications du moteur.
- Gestion thermique : incorporez des solutions de refroidissement telles que des dissipateurs thermiques ou un refroidissement actif si l’application implique une utilisation prolongée.
- Sélection des matériaux : utilisez des aimants et des matériaux d’enroulement de haute qualité pour garantir la durabilité et l’efficacité.
- Coût/avantage : évaluez si les avantages d’une conception sans fente justifient le coût initial plus élevé de votre application.
Évaluez les compromis entre coût et performances
Les moteurs BLDC sans fente sont généralement plus chers que leurs homologues à fente en raison de leur conception avancée et de la complexité de leur fabrication. Pour justifier le coût :
- Assurez-vous que l’application exige des avantages tels qu’un faible bruit, une efficacité élevée ou un couple de cogging nul.
- Au lieu de vous concentrer uniquement sur les dépenses initiales, prenez en compte l’ensemble du coût de possession, qui comprend la maintenance et l’efficacité opérationnelle.
Consultez les fabricants et les fournisseurs
- En cas de doute, consultez les fabricants ou les fournisseurs pour vous assurer de choisir le bon moteur pour votre application. Soyez prêt à discuter des spécificités de votre projet, telles que :
- Les exigences de performances nécessaires
- Les conditions de fonctionnement
- Les contraintes de conception (taille, poids ou options de montage)
Comparer les principales caractéristiques à l’aide d’une matrice de décision
Créez une matrice de décision pour comparer les moteurs potentiels en fonction de vos critères. Vous trouverez ci-dessous un exemple de matrice permettant d’évaluer trois moteurs :
| Critères | Moteur A | Moteur B | Moteur C |
| Puissance (W) | 500 | 450 | 600 |
| Efficacité (%) | 92 | 89 | 94 |
| Bruit (dB) | 25 | 30 | 22 |
| Coût ($) | 300 | 250 | 350 |
| Ondulation du couple | Faible | Moyenne | Faible |
| Résistance thermique | Bonne | Moyenne | Excellente |
Erreurs courantes à éviter
- Sous-estimation des besoins en couple : tenez toujours compte du couple de démarrage et du couple de pointe pour éviter de surcharger le moteur.
- Négligence de la compatibilité du contrôleur : assurez-vous que votre contrôleur prend en charge la tension, le courant et les besoins de communication du moteur.
- Ignorer la gestion thermique : les moteurs sans fente peuvent nécessiter des solutions de refroidissement supplémentaires pour les applications à haute puissance ou à service continu.
Étude de cas : Sélection d’un moteur pour une application de drone
Exigences de l’application :
- Fonctionnement fluide pour la stabilisation de la caméra
- Léger et compact
- Couple élevé à faible régime pour un contrôle précis
Moteur choisi : un moteur BLDC sans fente avec :
- Conception à rotor extérieur pour une stabilité accrue
- Faible ondulation de couple pour un fonctionnement fluide
- Évaluations de rendement élevé pour économiser l’énergie de la batterie
Conclusion
Le choix du bon moteur BLDC sans fente implique une évaluation détaillée des exigences de l’application, des spécifications du moteur et des compromis de performances. Vous pouvez sélectionner un moteur qui répond à vos besoins spécifiques en vous concentrant sur des facteurs clés tels que le couple, la vitesse, l’efficacité et la compatibilité du contrôleur. La collaboration avec les fabricants ou l’utilisation d’une matrice de décision peut simplifier le processus de sélection. Avec le bon moteur BLDC sans encoches, votre projet bénéficiera d’un fonctionnement fluide, d’un faible bruit et de performances fiables, garantissant le succès dans les applications exigeantes.