Les moteurs électriques, appelés moteurs pas à pas, sont fréquemment utilisés dans des applications nécessitant un contrôle précis de la position, de la vitesse et de la direction de rotation. Ils se distinguent des moteurs à courant continu classiques par le fait qu’ils se déplacent par étapes discrètes, ce qui permet un contrôle plus précis du mouvement du moteur.
Qu’est-ce qu’un moteur pas à pas ?
Chaque pas correspond à une rotation angulaire de l’arbre du moteur, et le moteur peut être contrôlé pour tourner selon un nombre défini de pas. Ces moteurs sont conçus pour tourner d’une quantité fixe, généralement dans la plage de 0,9° à 1,8° par pas, selon la conception du moteur.
La capacité des moteurs pas à pas à réaliser un contrôle précis sans nécessiter de systèmes de rétroaction est son principal avantage par rapport aux autres types de moteurs (tels que les moteurs à courant continu à balais). Les moteurs pas à pas sont généralement contrôlés en envoyant une séquence d’impulsions électriques aux enroulements du moteur, chaque impulsion provoquant le déplacement du moteur d’un pas en avant ou en arrière.
Types de moteurs pas à pas
Avant de plonger dans les techniques de contrôle, il est important de comprendre les différents types de moteurs pas à pas, car ils affectent la façon dont le moteur est contrôlé :
Moteurs pas à pas à aimant permanent (PM) :
- Avec un aimant permanent dans le rotor, ces moteurs offrent un couple et une efficacité accrus à des vitesses réduites.
- Il s’agit du type de moteur pas à pas le plus courant et il est idéal pour les applications à faible vitesse.
Moteurs pas à pas à réluctance variable (VR) :
- Dans ces moteurs, le rotor est en fer doux et le mouvement du rotor est guidé par les changements de réluctance magnétique lorsque le stator est alimenté.
- Par rapport aux moteurs PM, ils ont un couple moindre mais une meilleure capacité de vitesse.
Moteurs pas à pas hybrides :
- Ils combinent les caractéristiques des moteurs pas à pas VR et PM. Le couple élevé, la précision et la vitesse sont tous équilibrés par eux.
- Les moteurs pas à pas hybrides sont les plus largement utilisés dans les applications industrielles.
Principes de base du contrôle des moteurs pas à pas
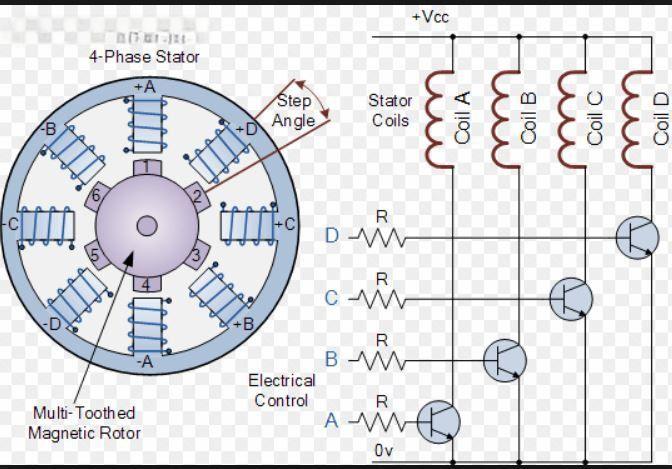
Les moteurs pas à pas s’appuient sur un ensemble d’enroulements disposés dans un stator pour générer des champs magnétiques. Le mouvement est créé par l’interaction de ces champs avec le rotor, ou composant rotatif. Généralement, avec un aimant permanent ou un morceau de fer doux, le rotor se déplace progressivement lorsque les enroulements du stator sont activés dans un ordre particulier.
Il existe plusieurs concepts clés à comprendre pour contrôler un moteur pas à pas :
Angle de pas :
L’angle de pas définit la quantité de mouvement du rotor à chaque pas. Par exemple, si un moteur pas à pas a un angle de pas de 1,8°, le rotor du moteur se déplacera de 1,8° à chaque impulsion.
La rotation totale du moteur peut être déterminée en divisant 360° par l’angle de pas. Par exemple, un moteur avec un angle de pas de 1,8° nécessiterait 200 pas pour effectuer une révolution complète (360° / 1,8° = 200 pas).
Modes de pas :
Les moteurs pas à pas peuvent être entraînés dans différents modes en fonction de la façon dont les bobines sont alimentées :
- Pas complet : le moteur est alimenté de telle sorte que chaque pas déplace le rotor de l’angle de pas complet.
- Demi-pas : le moteur se déplace par pas plus petits, offrant un mouvement plus fluide et une résolution plus élevée.
- Microstepping : il s’agit du mode le plus avancé, dans lequel les bobines du moteur sont alimentées de manière à ce que le rotor se déplace par très petits incréments. Cela permet un contrôle très précis et un mouvement fluide.
Phase et bobine :
- Un moteur pas à pas est constitué de plusieurs phases ou bobines. En alimentant ces bobines dans la séquence correcte, le rotor est forcé de se déplacer par incréments.
- Par exemple, dans un moteur pas à pas biphasé, le rotor tourne par étapes distinctes en raison du champ magnétique créé par les bobines alimentées dans un ordre particulier.
Méthodes de contrôle d’un moteur pas à pas
Il existe plusieurs façons de contrôler un moteur pas à pas, chacune avec ses propres avantages et inconvénients. La méthode que vous choisissez dépend de l’application, de la précision requise et du matériel disponible.
Utilisation d’un microcontrôleur (par exemple, Arduino)
Les moteurs pas à pas sont souvent contrôlés par des microcontrôleurs. Ils produisent les signaux d’impulsion requis qui sont transmis au circuit de commande du moteur, qui régule le courant traversant les bobines du moteur. Cette technique est fréquemment appliquée aux petites machines et aux projets de bricolage.
Par exemple, un Arduino peut contrôler un moteur pas à pas en utilisant une bibliothèque telle qu’AccelStepper. L’Arduino envoie une série d’impulsions numériques au pilote du moteur, et le pilote fournit la tension et le courant appropriés aux bobines du moteur.
Exemple de code Arduino de base :
#include
<Stepper.h>
const int stepsPerRevolution = 200; // Change this to match your motor’s specification // Initialize the Stepper library with the number of steps per revolution
Stepper stepper(stepsPerRevolution, 8, 9, 10, 11); void setup() {
// Set the motor speed (in RPM)
stepper.setSpeed(60);
} void loop() {
// Move the motor 100 steps forward
stepper.step(100);
delay(1000); // Move the motor 100 steps backward
stepper.step(-100);
delay(1000);
}
Utilisation d’un pilote de moteur pas à pas dédié
Vous pouvez contrôler le courant circulant vers les bobines du moteur pas à pas à l’aide d’un circuit spécialisé appelé pilote de moteur pas à pas, tel que l’A4988 ou le DRV8825. En plus de gérer les courants plus élevés nécessaires aux moteurs pas à pas, ces pilotes offrent des capacités de micro-pas pour un mouvement plus fluide. Par exemple, un Arduino ou d’autres microcontrôleurs peuvent être combinés avec un pilote tel que l’A4988 pour contrôler le moteur pas à pas via des signaux d’impulsion. Le microcontrôleur génère un signal et le pilote contrôle les bobines du moteur en fonction de ce signal.
Câblage de base pour un pilote A4988 avec un Arduino :
- VDD vers Arduino 5 V
- GND vers Arduino GND
- STEP vers une broche numérique Arduino (par exemple, la broche 3)
- DIR vers une broche numérique Arduino (par exemple, la broche 4)
- VMOT vers une alimentation moteur
- Broches M0, M1, M2 pour les réglages de micro-pas (en option)
Utilisation d’un ordinateur ou d’un automate programmable
Pour les applications industrielles et plus complexes, les moteurs pas à pas peuvent être contrôlés par un ordinateur exécutant un logiciel de contrôle ou par un PLC. Cette configuration est courante dans les machines CNC et les systèmes automatisés, où un contrôle de niveau supérieur est nécessaire pour plusieurs moteurs et un mouvement de précision.
Contrôle avec une alimentation électrique
Outre les pilotes, l’alimentation électrique est un élément clé du contrôle du moteur pas à pas. Les spécifications de tension et de courant du moteur et du pilote doivent correspondre, car une alimentation électrique incorrecte peut provoquer une surchauffe, une perte de couple et des dommages au moteur.
Signaux de contrôle et synchronisation
- Fréquence d’impulsion (fréquence) : la fréquence du signal d’impulsion détermine la vitesse du moteur. Un mouvement plus rapide est associé à une fréquence plus élevée, tandis qu’un mouvement plus lent est associé à une fréquence plus basse.
- Contrôle de direction : pour de nombreux pilotes, la broche DIR contrôle le sens de rotation. Le changement de l’état de cette broche (HIGH ou LOW) inversera la rotation du moteur.
Tableau récapitulatif de la commande des moteurs pas à pas
| Méthode de Contrôle | Avantages | Inconvénients |
| Microcontrôleur | Coût faible, simple, facile à programmer | Gestion de puissance limitée |
| Driver de Pas Dedicaé | Fiable, gère une puissance plus élevée, supporte le micro-pas | Câblage plus complexe, coût supplémentaire |
| Contrôle basé sur PLC/Ordinateur | Précision élevée, évolutif pour des systèmes larges | Coûteux, configuration complexe |
| Contrôle de l’Alimentation | Basique, fonctionne pour des applications simples | Fonctionnalité limitée, pas de contrôle avancé |
Considérations clés lors du contrôle d’un moteur pas à pas
- Exigences en matière d’alimentation : les moteurs pas à pas nécessitent plus d’énergie que les moteurs à courant continu classiques, en particulier lorsqu’ils sont sous charge ou fonctionnent à grande vitesse. Pour éviter tout dommage, utilisez toujours une alimentation compatible avec les exigences du moteur.
- Dissipation thermique : les moteurs pas à pas ont tendance à chauffer, en particulier sous de lourdes charges. Si votre moteur fonctionne pendant de longues périodes, assurez-vous qu’il dispose d’une ventilation adéquate ou envisagez d’ajouter des dissipateurs thermiques ou des ventilateurs.
- Micro-pas : alors que le pas complet donne au moteur son couple le plus élevé, le micro-pas offre un mouvement plus fluide et une meilleure précision, bien qu’avec un couple réduit. Lorsque vous choisissez votre approche de contrôle, il est essentiel de comprendre les compromis.
Conclusion
Comprendre le comportement d’un moteur pas à pas et choisir la meilleure stratégie de contrôle pour votre application est essentiel pour le contrôler. Que vous utilisiez un microcontrôleur comme Arduino, un pilote dédié comme l’A4988 ou des systèmes industriels plus avancés, les moteurs pas à pas offrent un excellent contrôle de la position et de la vitesse sans avoir besoin de systèmes de rétroaction. En choisissant la bonne combinaison d’alimentation, de pilotes et de signaux de contrôle, vous pouvez obtenir un fonctionnement précis et fiable pour votre projet.