Les moteurs pas à pas sont un composant essentiel des applications de contrôle de précision, offrant un mouvement et un positionnement précis en effectuant des mouvements incrémentiels. Parmi les différents types de moteurs pas à pas, le moteur pas à pas à aimant permanent (PM) et le moteur pas à pas à réluctance variable (VR) se distinguent par leurs structures et principes de fonctionnement uniques.
Les types de moteurs pas à pas
Les moteurs pas à pas convertissent les impulsions électriques en rotation mécanique, permettant un contrôle précis du mouvement sans avoir besoin de systèmes de rétroaction. Voici les principaux types de moteurs pas à pas :
- Moteurs pas à pas à aimant permanent (PM) : Ces moteurs utilisent des aimants permanents dans le rotor pour produire des pas discrets.
- Moteurs pas à pas à réluctance variable (VR) : Ces moteurs fonctionnent en utilisant la réluctance magnétique plutôt que des aimants permanents dans le rotor.
- Moteurs pas à pas hybrides : Une combinaison de conceptions PM et VR, offrant une précision améliorée. Cependant, du point de vue du contrôleur, les hybrides sont similaires aux moteurs pas à pas PM.
Principales différences entre PMSM et VRSM
| Aspect | Moteur pas à pas à aimant permanent (PMSM) | Moteur pas à pas à réluctance variable (VRSM) |
| Composition du rotor | Aimant permanent | Noyau en fer doux |
| Principe de fonctionnement | Interaction magnétique entre le champ du stator et les pôles du rotor | Le rotor s’aligne pour minimiser la réluctance magnétique |
| Couple de maintien | Élevé en raison du champ magnétique permanent | Inférieur, dépendant de l’attraction magnétique |
| Précision de pas | Élevé, offre généralement un fonctionnement plus fluide et une résolution plus élevée | Inférieur, en raison de la dépendance à l’alignement par réluctance magnétique |
| Couple de détente | Présent (le moteur maintient sa position sans courant) | Absent (rotor libre de tourner lorsqu’il n’est pas sous tension) |
| Coût | Plus élevé en raison de l’utilisation d’aimants permanents | Construction inférieure et plus simple sans aimants permanents |
| Applications | Utilisé dans les applications nécessitant une précision et un couple élevés | Convient aux applications nécessitant un contrôle de mouvement plus simple à moindre coût |
| Rapport couple/inertie | Généralement élevé, ce qui le rend efficace pour une accélération et une décélération rapides | Plus bas, donc moins adapté aux applications à grande vitesse |
Différences structurelles
La compréhension de la structure de ces moteurs permet de mieux comprendre leurs comportements opérationnels.
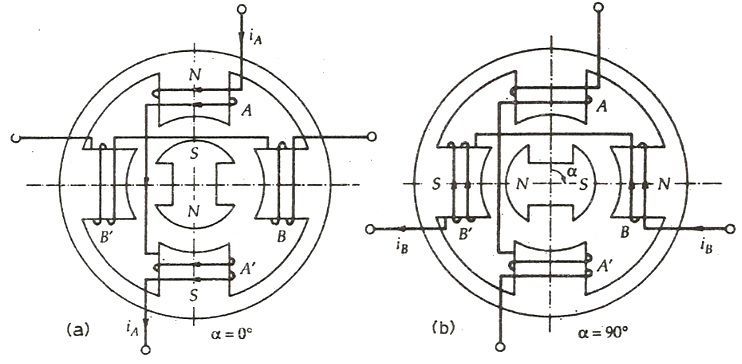
Moteur Pas à Pas à Aimant Permanent
Les aimants permanents intégrés au rotor des moteurs pas à pas PM interagissent avec le champ électromagnétique du stator. Cette conception confère au rotor un effet de « détente », ce qui signifie qu’il a tendance à rester dans des positions fixes même lorsqu’il n’est pas alimenté. Le mouvement du rotor semble engrené ou cranté lorsqu’il est tourné manuellement, en raison de l’attraction magnétique entre le rotor et les pôles du stator.
Configuration de l’enroulement :
- En général, il comporte deux enroulements séparés, avec ou sans prise centrale.
- Peut être identifié à l’aide d’un ohmmètre, car il affichera deux enroulements séparés sans retour commun.
Résolution angulaire :
- Les moteurs pas à pas PM peuvent atteindre des résolutions de pas plus fines, allant souvent de 1,8 degré par pas à même 0,72 degré par pas, selon le modèle et la configuration.
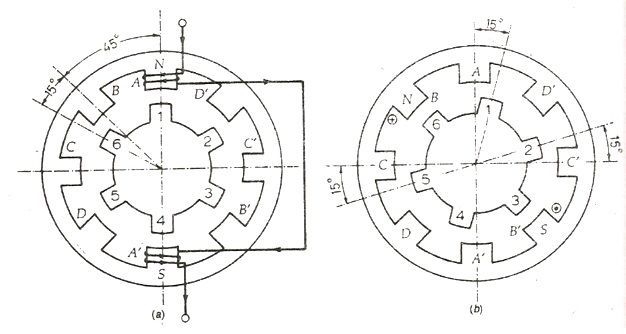
Moteur pas à pas à réluctance variable
Le rotor des moteurs pas à pas à réluctance variable est toutefois dépourvu d’aimants permanents. Au lieu de cela, le rotor est constitué d’un fer doux ou d’un matériau ferromagnétique qui s’aligne avec les pôles du stator lorsqu’il est sous tension, minimisant ainsi la réluctance magnétique et créant un mouvement de rotation. Sans alimentation, les moteurs à réluctance variable tournent généralement plus librement, avec seulement une légère résistance due à la magnétisation résiduelle du rotor.
Configuration d’enroulement :
- Les moteurs VR ont souvent trois ou quatre enroulements, avec un retour commun. Cela peut être confirmé à l’aide d’un ohmmètre, car il montrera plusieurs enroulements partageant un seul chemin de retour.
Résolution angulaire :
- Les moteurs pas à pas VR ont généralement des angles de pas plus grossiers que les moteurs pas à pas PM. L’angle de pas typique des moteurs VR est plus élevé, par exemple 15 ou 30 degrés par pas, ce qui limite leur résolution pour les applications nécessitant un contrôle plus précis.
Identification des moteurs pas à pas PM et VR
Si l’étiquette d’un moteur pas à pas est manquante, la distinction entre les moteurs pas à pas PM et VR peut être effectuée par de simples observations et tests : pour tester le rotor manuellement, faites-le tourner avec vos doigts.
- Moteur pas à pas PM : le rotor semble engrené ou entaillé en raison de l’attraction magnétique des aimants permanents.
- Moteur pas à pas VR : le rotor tourne plus librement, avec une résistance minimale.
Test de l’ohmmètre : examinez la configuration de l’enroulement avec un ohmmètre.
- Moteur pas à pas PM : possède généralement deux enroulements indépendants.
- Moteur pas à pas VR : possède généralement trois ou quatre enroulements avec un retour commun partagé.
Fonctionnement et couple de maintien
Les moteurs pas à pas PM et VR bloquent le rotor en place à un angle fixe lorsqu’au moins un enroulement est sous tension. Ce couple de maintien est crucial pour les applications où le moteur doit maintenir sa position lorsqu’il est stationnaire.
- Moteurs pas à pas PM : fournit un couple de maintien plus important en raison du contact magnétique des aimants permanents du stator et du rotor. Ce couple de maintien permet au moteur de résister aux forces externes jusqu’à un certain point avant que le couple ne soit dépassé.
- Moteurs pas à pas VR : ils ont un couple de maintien inférieur à celui des moteurs pas à pas PM car le rotor n’a pas d’aimants permanents. L’effet de maintien est produit uniquement par l’alignement des pôles du stator sous tension avec les dents du rotor.
Résolution angulaire et micropas
Les moteurs pas à pas peuvent varier considérablement en termes de résolution de pas. Le choix entre un moteur pas à pas PM et un moteur pas à pas VR dépend souvent de la précision requise :
- Moteurs pas à pas PM : ils offrent généralement des résolutions de pas plus fines, telles que 1,8 ou 0,72 degrés par pas. Avec des contrôleurs avancés, les moteurs PM peuvent fonctionner en modes demi-pas ou micro-pas, permettant des pas encore plus petits et un mouvement plus fluide.
- Moteurs pas à pas VR : ils offrent généralement des angles de pas plus grossiers, tels que 15 ou 30 degrés par pas, ce qui limite leur utilisation dans les applications de haute précision.
Applications et adéquation
Le choix entre les moteurs pas à pas PM et VR dépend des besoins spécifiques de l’application :
Moteurs pas à pas à aimant permanent
Avantages :
- Haute précision avec frésolutions de pas inertes.
- Elles sont adaptées aux applications nécessitant une précision de positionnement élevée en raison de leur couple de maintien plus élevé.
Limites:
- Plus complexes et potentiellement plus coûteux que les moteurs VR.
Cas d’utilisation :
- Imprimantes, robotique et instruments de précision où un mouvement fluide et contrôlé est essentiel.
Moteurs pas à pas à réluctance variable
Avantages :
- Construction plus simple, entraînant souvent des coûts inférieurs.
- Configurations d’enroulement moins complexes par rapport aux conceptions hybrides.
Limites :
- Ils conviennent moins aux applications de haute précision en raison de leur résolution de pas plus grossière et de leur couple de maintien plus faible.
- La rotation libre sans alimentation peut être un inconvénient dans les applications nécessitant un maintien stationnaire.
Relever les défis et améliorer les performances
Pour les deux types de moteurs, garantir des performances optimales peut impliquer des ajustements et des améliorations :
Amélioration des performances du moteur pas à pas
- Moteurs pas à pas PM : utilisez des pilotes à micro-pas pour obtenir un fonctionnement plus fluide et des tailles de pas plus petites. Cela réduit la possibilité de résonance à basse vitesse et permet un contrôle plus précis du mouvement.
- Moteurs pas à pas VR : associez-les à des contrôleurs bien adaptés qui peuvent optimiser la répartition du couple pour un fonctionnement plus fluide.
Gestion des exigences de charge et de couple
- Moteurs PM : assurez-vous que le couple du moteur est suffisant pour la charge qu’il doit déplacer. Les applications à charge élevée peuvent bénéficier de moteurs avec des couples nominaux plus élevés ou de mécanismes de réduction de vitesse.
- Moteurs VR : choisissez les moteurs pas à pas VR pour les applications avec des exigences de couple plus faibles, car leur conception plus simple peut être plus rentable.
Conclusion
Bien que les moteurs pas à pas à aimant permanent et les moteurs pas à pas à réluctance variable constituent des solutions efficaces pour le contrôle du mouvement, leurs différentes caractéristiques les rendent adaptés à différents types d’applications. Les fabricants de moteurs pas à pas soulignent que les moteurs pas à pas PM offrent une plus grande précision, un meilleur couple de maintien et une résolution de pas plus fine, ce qui en fait un choix incontournable pour les tâches de précision. À l’inverse, les moteurs pas à pas VR sont plus faciles à utiliser et moins chers, ce qui les rend appropriés aux utilisations où un couple et une résolution élevés ne sont pas essentiels.