Lorsqu’on parle de moteurs utilisés dans diverses applications mécaniques et électroniques, les moteurs pas à pas et les moteurs à courant continu sont souvent mentionnés. Bien que les moteurs pas à pas soient techniquement un type de moteur à courant continu, leur conception, leur fonctionnement et leur application diffèrent considérablement des moteurs à courant continu traditionnels. Il est essentiel pour les ingénieurs, les amateurs et les techniciens qui cherchent à sélectionner le bon moteur pour leurs projets de comprendre ces différences.
Moteur pas à pas : un sous-type de moteur courant continu
Il est essentiel d’établir que les moteurs pas à pas sont un sous-ensemble des moteurs à courant continu avant d’explorer les distinctions. Les moteurs pas à pas et les moteurs à courant continu conventionnels fonctionnent tous deux en courant continu (CC), ce qui signifie qu’ils sont alimentés par de l’électricité qui circule dans une seule direction. Cependant, leurs structures et leurs méthodes de fonctionnement diffèrent, ce qui entraîne des caractéristiques et des utilisations distinctes. Un type spécifique de moteur à courant continu appelé moteur pas à pas est conçu pour se déplacer en plusieurs étapes distinctes. Contrairement aux moteurs à courant continu conventionnels qui tournent en continu, les moteurs pas à pas avancent progressivement selon des angles précis (étapes) lorsque des impulsions électriques sont appliquées. Les moteurs pas à pas sont parfaits pour les applications nécessitant un mouvement de précision en raison de leur mouvement pas à pas, qui permet un contrôle exact de la position.
Comment fonctionnent les moteurs pas à pas et les moteurs à courant continu ?
Pour comprendre les différences entre les moteurs pas à pas et les moteurs à courant continu, il est important d’examiner le fonctionnement de chaque type de moteur.
Fonctionnement du moteur pas à pas
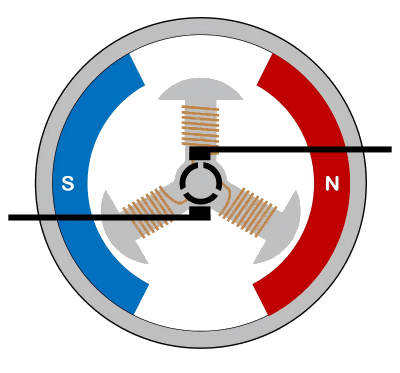
Un moteur pas à pas se compose d’un rotor (un noyau magnétique ou ferromagnétique) entouré de plusieurs bobines de stator disposées en phases. Ces bobines fournissent des champs magnétiques qui attirent ou repoussent le rotor, le faisant se déplacer progressivement, selon l’ordre dans lequel elles sont alimentées. Une partie d’une rotation complète est représentée par chaque pas, qui varie normalement de 1,8° à 15°. L’alimentation séquentielle des bobines peut être contrôlée par un pilote de moteur pas à pas ou un microcontrôleur, permettant au moteur de se déplacer avec précision par pas prédéterminés.
Les principales caractéristiques des moteurs pas à pas sont les suivantes :
- Mouvement discret : un contrôle précis de la position et de la rotation est possible car les moteurs pas à pas se déplacent par étapes.
- Couple de maintien élevé : lorsqu’un moteur pas à pas ne tourne pas, il peut maintenir sa position avec un couple élevé.
- Commande par impulsions : les moteurs pas à pas fonctionnent en obtenant des impulsions de courant qui spécifient le nombre d’étapes et la direction du mouvement.
Fonctionnement du moteur courant continu
Les moteurs à courant continu conventionnels, en revanche, fonctionnent selon des principes plus simples. Un moteur à courant continu possède généralement un rotor (armature) et un stator qui créent un champ magnétique constant. Lorsqu’une tension est appliquée aux bornes, le courant circule dans les enroulements de l’armature, créant un champ magnétique qui interagit avec le champ magnétique du stator. Cette interaction crée un couple, ce qui fait tourner le rotor en continu.
Les principales caractéristiques des moteurs à courant continu sont les suivantes :
- Rotation continue : les moteurs à courant continu tournent en continu lorsqu’ils sont alimentés, ce qui les rend adaptés aux applications nécessitant un mouvement fluide et continu.
- Fonctionnement simple : ils sont simples à contrôler, ne nécessitant souvent qu’une alimentation variable ou un contrôleur de moteur pour la régulation de la vitesse.
- Haute vitesse : les moteurs à courant continu peuvent atteindre des vitesses élevées, ce qui peut être utile dans des applications telles que les ventilateurs, les pompes et d’autres systèmes mécaniques.
Moteurs pas à pas et moteurs à courant continu
Bien qu’ils soient tous deux alimentés par du courant continu, les moteurs pas à pas et les moteurs à courant continu diffèrent considérablement en termes de structure, de mécanismes de contrôle et d’applications. Voici une liste des principales distinctions entre ces deux types de moteurs :
A. Mouvement et positionnement
Moteur pas à pas : la capacité à se déplacer par incréments exacts et incrémentiels est ce qui distingue un moteur pas à pas. De ce fait, les moteurs pas à pas sont idéaux pour les appareils tels que les bras robotisés, les machines CNC et les imprimantes 3D qui nécessitent un positionnement précis. Étant donné que le nombre d’impulsions données au moteur détermine la quantité de mouvement qu’il effectue, les moteurs pas à pas n’ont pas besoin de systèmes de rétroaction pour rester en place. Moteur à courant continu : un moteur à courant continu conventionnel offre une rotation continue et est mieux adapté aux applications où un mouvement fluide et ininterrompu est requis, comme dans les bandes transporteuses et les entraînements mécaniques simples. Un mécanisme de rétroaction externe, comme un potentiomètre ou un encodeur, est souvent nécessaire pour le contrôle de position avec des moteurs à courant continu afin de suivre et de modifier la position.
B. Contrôle de vitesse
Moteur pas à pas : en modifiant la fréquence d’impulsion d’entrée, les moteurs pas à pas peuvent obtenir un contrôle précis de la vitesse. Cependant, leur vitesse maximale est généralement inférieure à celle des moteurs à courant continu et le couple diminue à mesure que la vitesse augmente. Les moteurs pas à pas fonctionnent bien dans les situations nécessitant à la fois un mouvement de précision et un contrôle de la vitesse. Moteur à courant continu : les moteurs à courant continu excellent dans le fonctionnement à grande vitesse et sont relativement simples à contrôler pour la régulation de la vitesse. La modulation de largeur d’impulsion (PWM) ou la modification de la tension d’entrée peuvent être utilisées pour régler la vitesse. Les moteurs à courant continu maintiennent mieux le couple à des vitesses élevées que les moteurs pas à pas. Cependant, leur vitesse maximale est généralement inférieure à celle des moteurs à courant continu et le couple diminue à mesure que la vitesse augmente. Les moteurs pas à pas fonctionnent bien dans les situations nécessitant à la fois un mouvement de précision et un contrôle de la vitesse.
Moteur à courant continu : les moteurs à courant continu excellent dans le fonctionnement à grande vitesse et sont relativement simples à contrôler pour la régulation de la vitesse. La modulation de largeur d’impulsion (PWM) ou la modification de la tension d’entrée peuvent être utilisées pour régler la vitesse. Les moteurs à courant continu maintiennent mieux le couple à des vitesses élevées que les moteurs pas à pas.
C. Couple et puissance
Moteur pas à pas : L’un des avantages des moteurs pas à pas est leur capacité à maintenir un couple élevé à basse vitesse, ce qui les rend idéaux pour maintenir fermement une position même sans rotation continue. Ce couple de maintien élevé est particulièrement utile dans les applications où une position stationnaire doit être maintenue sous charge. Moteur à courant continu : Les moteurs à courant continu peuvent fournir un couple élevé à des vitesses élevées, mais leur couple diminue généralement lorsque le moteur ralentit. Bien qu’ils puissent être modifiés avec des systèmes d’engrenages pour augmenter le couple, ils n’ont pas la capacité inhérente de maintenir le couple à l’arrêt sans contrôle supplémentaire.
D. Complexité et contrôle
Moteur pas à pas : Le système de contrôle des moteurs pas à pas est plus complexe que celui des moteurs à courant continu. Les moteurs pas à pas nécessitent des contrôleurs ou des pilotes spécialisés qui envoient des séquences d’impulsions pour faire tourner le moteur en étapes spécifiques. Cependant, cette complexité permet un contrôle plus précis du mouvement et de l’emplacement. Moteur à courant continu : Les moteurs à courant continu sont plus simples à contrôler, car ils n’ont besoin que d’une source d’alimentation et, éventuellement, d’un pilote ou d’un contrôleur de moteur pour régler la vitesse. Le contrôle de direction peut être géré avec un simple circuit en pont en H, ce qui les rend plus faciles à mettre en œuvre pour les applications de base.
E. Rétroaction et précision
Moteur pas à pas : les moteurs pas à pas ont l’avantage de ne pas nécessiter de dispositifs de rétroaction pour le placement en boucle ouverte. La position précise est déterminée par la quantité d’impulsions, ce qui garantit un niveau de précision élevé. Cependant, sans système en boucle fermée, il existe un risque de pas manqués sous une charge élevée ou dans des conditions de vitesse élevée. Moteur à courant continu : pour un positionnement précis, les moteurs à courant continu nécessitent généralement un système de rétroaction, tel qu’un encodeur, pour fournir des informations sur la position ou la vitesse du moteur. Ce contrôle en boucle fermée garantit une plus grande précision et corrige les écarts pendant le fonctionnement.
Voici le tableau comparatif suivant :
| Fonctionnalité | Moteur pas à pas | Moteur courant continu |
| Mouvement | Se déplace par étapes précises | Rotation continue |
| Contrôle | Nécessite un pilote complexe pour le contrôle des impulsions | Contrôle simple avec source d’alimentation |
| Positionnement | Haute précision sans rétroaction | Nécessite un retour d’information pour un positionnement précis |
| Couple | Couple élevé à faible vitesse | Couple élevé à grande vitesse |
| Vitesse | Vitesse maximale inférieure | Vitesse maximale plus élevée |
| Couple de maintien | Maintient la position à l’arrêt | Nécessite de la puissance pour maintenir la position |
| Application | Tâches de précision (par exemple, imprimantes 3D, CNC) | Tâches à grande vitesse (par exemple, ventilateurs, pompes) |
Adéquation des applications
L’utilisation d’un moteur pas à pas ou d’un moteur à courant continu dépend des exigences spécifiques de l’application : les moteurs pas à pas fonctionnent mieux dans les situations qui nécessitent un contrôle précis du positionnement et du mouvement. Parmi les exemples courants, citons :
- Impression 3D : assure un mouvement précis de la tête d’impression.
- Machines CNC : assure un positionnement exact de l’outil.
- Bras robotisés : permet un mouvement contrôlé pour les opérations de pick-and-place.
Les moteurs à courant continu sont parfaits pour les applications qui nécessitent une rotation continue et fluide sans se concentrer sur la précision. Ils sont couramment utilisés dans :
- Ventilateurs et souffleurs : assurent un flux d’air constant.
- Véhicules électriques : assurent une propulsion fluide et efficace.
- Convoyeurs à bande : assurent un mouvement constant pour la manutention des matériaux.
Bien que les moteurs pas à pas soient un sous-type de moteurs à courant continu, leurs caractéristiques uniques les distinguent des moteurs à courant continu traditionnels. Comme ils peuvent se déplacer par incréments distincts, les fabricants de moteurs pas à pas créent ces moteurs pour qu’ils fonctionnent exceptionnellement bien dans les situations qui nécessitent un contrôle et un positionnement précis. D’autre part, les moteurs à courant continu conventionnels sont plus simples à utiliser et conviennent mieux aux tâches de rotation continue à grande vitesse.