Stepper motors are a crucial component in precision control applications, offering accurate movement and positioning by stepping in incremental motions. Among the different types of stepper motors, the permanent magnet (PM) stepper motor and the variable reluctance (VR) stepper motor stand out due to their unique structures and operational principles.
The Types of Stepper Motors
Stepper motors convert electrical pulses into mechanical rotation, allowing for precise control of movement without needing feedback systems. The following are the main kinds of stepper motors:
- Permanent Magnet Stepper Motors(PM): These motors use permanent magnets in the rotor to produce discrete steps.
- Variable Reluctance Stepper Motors(VR): These motors function by using magnetic reluctance rather than permanent magnets in the rotor.
- Hybrid Stepper Motors: A combination of PM and VR designs, offering enhanced precision. However, from a controller’s perspective, hybrids are similar to PM stepper motors.
Key Differences Between PMSM and VRSM
| Aspect | Permanent Magnet Stepper Motor (PMSM) | Variable Reluctance Stepper Motor (VRSM) |
| Rotor Composition | Permanent magnet | Soft iron core |
| Operating Principle | Magnetic interaction between the stator field and rotor poles | Rotor aligns to minimize magnetic reluctance |
| Holding Torque | High due to permanent magnetic field | Lower, dependent on magnetic attraction |
| Stepping Accuracy | High, typically provides smoother operation and higher resolution | Lower, due to reliance on magnetic reluctance alignment |
| Detent Torque | Present (motor holds its position without current) | Absent (rotor free to rotate when not energized) |
| Cost | Higher due to the use of permanent magnets | Lower, simpler construction without permanent magnets |
| Applications | Used in applications requiring high precision and torque | Suitable for applications needing simpler motion control at a lower cost |
| Torque-to-Inertia Ratio | Generally high, making it effective for quick acceleration and deceleration | Lower, thus less suitable for high-speed applications |
Structural Differences
Understanding the structure of these motors provides insight into their operational behaviors.
Permanent Magnet Stepper Motor
Permanent magnets built into the rotor of PM stepper motors interact with the electromagnetic field of the stator. This design gives the rotor a “detent” effect, meaning it tends to stay at fixed positions even when not powered. The rotor’s movement feels geared or notched when turned manually, due to the magnetic attraction between the rotor and the stator poles.
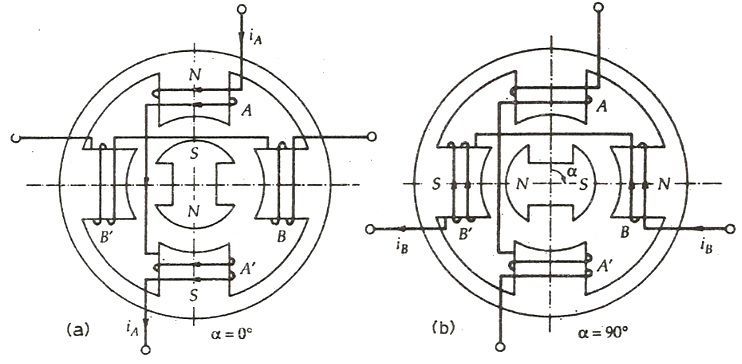
Winding Configuration:
- Typically, it has two separate windings, either with or without a center tap.
- Can be identified using an ohmmeter, as it will show two separate windings without a common return.
Angular Resolution:
- PM stepper motors can achieve finer step resolutions, often ranging from 1.8 degrees per step to even 0.72 degrees per step, depending on the model and configuration.
Variable Reluctance Stepper Motor
The rotor of VR stepper motors, however, is devoid of permanent magnets. Instead, the rotor is made of a soft iron or ferromagnetic material that aligns with the stator poles when energized, minimizing magnetic reluctance and creating rotational movement. Without power, VR motors typically spin more freely, with only slight resistance due to residual magnetization in the rotor.
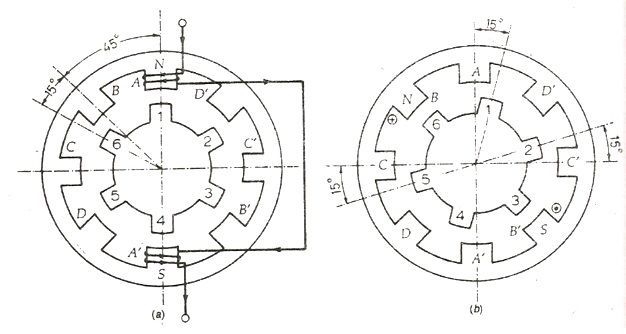
Winding Configuration:
- VR motors often have three or four windings, with a common return. This can be confirmed using an ohmmeter, as it will show multiple windings sharing a single return path.
Angular Resolution:
- VR stepper motors generally have coarser step angles compared to PM stepper motors. The typical step angle for VR motors is higher, such as 15 or 30 degrees per step, which limits their resolution for applications requiring finer control.
Identifying PM and VR Stepper Motors
If the label on a stepper motor is missing, differentiating between PM and VR stepper motors can be done through simple observations and tests:
To test the rotor manually, turn it with your fingers.
- PM Stepper Motor: The rotor feels geared or notched due to the permanent magnets’ magnetic attraction.
- VR Stepper Motor: The rotor spins more freely, with minimal resistance.
Ohmmeter Test: Examine the winding configuration with an ohmmeter.
- PM Stepper Motor: Typically has two independent windings.
- VR Stepper Motor: Usually has three or four windings with a shared common return.
Operation and Holding Torque
Both PM and VR stepper motors lock the rotor in place at a fixed angle when at least one winding is energized. This holding torque is crucial for applications where the motor must maintain its position while it is stationary.
- PM Stepper Motors: Provides more holding torque as a result of the stator’s and rotor’s permanent magnets’ magnetic contact. This holding torque allows the motor to resist external forces up to a certain point before the torque is exceeded.
- VR Stepper Motors: Have a lower holding torque compared to PM stepper motors since the rotor lacks permanent magnets. The holding effect is produced solely by the energized stator poles aligning with the rotor teeth.
Angular Resolution and Microstepping
Stepper motors can vary widely in their step resolution. The choice between a PM stepper motor and a VR stepper motor often depends on the required precision:
- PM Stepper Motors: Typically provide finer step resolutions, such as 1.8 or 0.72 degrees per step. With advanced controllers, PM motors can be operated in half-step or micro stepping modes, allowing even smaller steps and smoother motion.
- VR Stepper Motors: Generally offer coarser step angles, such as 15 or 30 degrees per step, limiting their use in high-precision applications.
Applications and Suitability
The choice between PM and VR stepper motors depends on the application’s specific needs:
Permanent Magnet Stepper Motors
Advantages:
- High precision with finer step resolutions.
- They are appropriate for applications needing high positional accuracy because of their greater holding torque.
Limitations:
- More intricate and possibly more costly than VR motors.
Use Cases: - Printers, robotics, and precision instruments where smooth, controlled movement is essential.
Variable Reluctance Stepper Motors
Advantages:
- Simpler construction, often resulting in lower costs.
- Less complex winding configurations compared to hybrid designs.
Limitations:
- They are less appropriate for high-precision applications due to their coarser step resolution and weaker holding torque.
- Free rotation without power can be a disadvantage in applications requiring stationary holding.
Addressing Challenges and Enhancing Performance
For both types of motors, ensuring optimal performance can involve adjustments and enhancements:
Improving Stepper Motor Performance
- PM Stepper Motors: Use micro-stepping drivers to achieve smoother operation and smaller step sizes. This lowers the possibility of resonance at low speeds and enables more accurate control over movement.
- VR Stepper Motors: Pair with well-matched controllers that can optimize torque distribution for smoother operation.
Handling Load and Torque Requirements
- PM Motors: Ensure the motor’s torque is sufficient for the load it needs to move. High-load applications may benefit from motors with higher torque ratings or gear reduction mechanisms.
- VR Motors: Choose VR stepper motors for applications with lower torque requirements, as their simpler design may be more cost-effective.
Conclusion
While both permanent magnet stepper motors and variable reluctance stepper motors serve as effective solutions for motion control, their different characteristics make them suitable for distinct types of applications. Stepper motor manufacturers highlight that PM stepper motors provide higher precision, better holding torque, and finer step resolution, making them a go-to choice for precision tasks. Conversely, VR stepper motors are easier to use and less expensive, which makes them appropriate for uses where high torque and resolution are not essential.