When discussing motors used in various mechanical and electronic applications, both stepper motors and DC motors are frequently mentioned. While stepper motors are technically a type of DC motor, their design, operation, and application differ significantly from traditional DC motors. Understanding these differences is essential for engineers, hobbyists, and technicians looking to select the right motor for their projects.
Stepper Motor: A Subtype of DC Motor
It is crucial to establish that stepper motors are a subset of DC motors before exploring the distinctions. Both stepper motors and conventional DC motors run on direct current (DC), which means they are powered by electricity that flows in a single direction. However, their structures and methods of operation differ, leading to distinct characteristics and uses.
A specific kind of DC motor called a stepper motor is made to travel in distinct steps. Unlike conventional DC motors that rotate continuously, stepper motors advance incrementally by precise angles (steps) when electrical pulses are applied. Stepper motors are perfect for applications needing precision movement because of its stepping motion, which enables exact position control.
How do Stepper Motors and DC Motors Work?
To understand the differences between stepper motors and DC motors, it is important to examine how each motor type operates.
Stepper Motor Operation
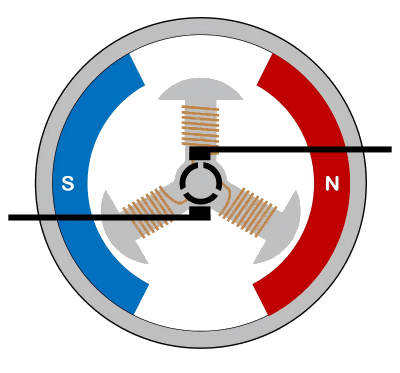
A stepper motor consists of a rotor (a magnetic or ferromagnetic core) surrounded by multiple stator coils arranged in phases. These coils provide magnetic fields that either attract or repel the rotor, causing it to move incrementally, depending on the order in which they are powered. A portion of a complete rotation is represented by each step, which normally ranges from 1.8° to 15°. The sequential energizing of the coils can be controlled by a stepper motor driver or a microcontroller, enabling the motor to move precisely in predetermined steps.
Key characteristics of stepper motors include:
- Discrete Movement: Accurate control over position and rotation is possible because stepper motors move in steps.
- High Holding Torque: When a stepper motor is not rotating, it can maintain its position with high torque.
- Pulse-controlled: Stepper motors work by obtaining current pulses that specify the number of steps and movement direction.
DC Motor Operation
Conventional DC motors, on the other hand, operate on simpler principles. A DC motor typically has a rotor (armature) and a stator that creates a constant magnetic field. When voltage is applied to the terminals, current flows through the armature windings, creating a magnetic field that interacts with the stator’s magnetic field. This interaction creates torque, causing the rotor to spin continuously.
Key characteristics of DC motors include:
- Continuous Rotation: DC motors rotate continuously when powered, making them suitable for applications requiring smooth and continuous movement.
- Simple Operation: They are straightforward to control, often requiring only a variable power supply or a motor controller for speed regulation.
- High Speed: DC motors can reach high speeds, which can be useful in applications such as fans, pumps, and other mechanical systems.
Stepper Motors vs. DC Motors
Despite both being powered by direct current, stepper motors and DC motors differ significantly in structure, control mechanisms, and applications.The following is a list of these two motor types’ primary distinctions:
A. Movement and Positioning
Stepper Motor: The capacity to move in exact, incremental increments is what distinguishes a stepper motor. Because of this, stepper motors are ideal for devices like robotic arms, CNC machines, and 3D printers that need precise positioning. Since the number of pulses given to the motor determines how much movement it makes, stepper motors don’t need feedback systems to stay in place.
DC Motor: A conventional DC motor offers continuous rotation and is better suited for applications where smooth, unbroken movement is required, such as in conveyor belts and simple mechanical drives. An external feedback mechanism, like a potentiometer or encoder, is frequently needed for position control with DC motors in order to track and modify the position.
B. Speed Control
Stepper Motor: By altering the input pulse frequency, stepper motors may achieve accurate speed control. However, their maximum speed is generally lower than that of DC motors, and torque decreases as speed increases. Stepper motors work well in situations requiring both precision movement and speed control.
DC Motor: DC motors excel at high-speed operation and are relatively simple to control for speed regulation. Pulse-width modulation (PWM) or changing the input voltage can be used to adjust speed. DC motors maintain torque better at high speeds compared to stepper motors.
C. Torque and Power
Stepper Motor: One of the advantages of stepper motors is their ability to maintain high torque at low speeds, making them ideal for holding a position firmly even without continuous rotation. This high holding torque is especially useful in applications where a stationary position needs to be maintained under load.
DC Motor: DC motors can deliver high torque at high speeds, but their torque generally drops as the motor slows down. While they can be modified with gear systems to increase torque, they do not have the inherent ability to maintain torque when stationary without additional control.
D. Complexity and Control
Stepper Motor: The control system for stepper motors is more complex than for DC motors. Stepper motors require specialized controllers or drivers that send pulse sequences to rotate the motor in specific steps. More exact control over the movement and location is made possible by this intricacy, though.
DC Motor: DC motors are simpler to control, as they only need a power source and, optionally, a motor driver or controller to adjust speed. Direction control can be managed with a simple H-bridge circuit, making them easier to implement for basic applications.
E. Feedback and Accuracy
Stepper Motor: Stepper motors have the advantage of not requiring feedback devices for open-loop placement. The precise position is determined by the amount of pulses, guaranteeing a high level of accuracy. However, without a closed-loop system, there is a risk of missed steps under heavy load or high-speed conditions.
DC Motor: For precise positioning, DC motors typically require a feedback system, such as an encoder, to provide information about the motor’s position or speed. This closed-loop control ensures higher accuracy and corrects any deviations during operation.
Here’s the following comparison chart:
| Feature | Stepper Motor | DC Motor |
| Movement | Moves in precise steps | Continuous rotation |
| Control | Requires complex driver for pulse control | Simple control with power source |
| Positioning | High accuracy without feedback | Needs feedback for accurate positioning |
| Torque | High torque at low speed | High torque at high speed |
| Speed | Lower max speed | Higher max speed |
| Holding Torque | Maintains position when stationary | Requires power to hold position |
| Application | Precision tasks (e.g., 3D printers, CNC) | High-speed tasks (e.g., fans, pumps) |
Application Suitability
Whether to utilize a stepper motor or a DC motor will depend on the specific requirements of the application:
Stepper motors work best in situations that require exact control over positioning and movement. Common examples include:
- 3D Printing: Ensures accurate movement of the printer head.
- CNC Machines: Provides exact tool positioning.
- Robotic Arms: Enables controlled movement for pick-and-place operations.
DC motors are perfect for applications that need continuous, smooth rotation without a strong focus on precision. They are commonly used in:
- Fans and Blowers: Provide constant airflow.
- Electric Vehicles: Deliver smooth, efficient propulsion.
- Conveyor Belts: Ensure consistent motion for material handling.
While stepper motors are a subtype of DC motors, their unique characteristics set them apart from traditional DC motors. Because they may move in distinct increments, stepper motor manufacturers create these motors to perform exceptionally well in situations that call for exact control and positioning. On the other hand, conventional DC motors are simpler to use and are better suited for high-speed, continuous rotation tasks.